

Содержание

Изображение 1. Мобильный лазерный
сканер SLAM 200E
1. Общие сведения о SLAM 200E
SLAM 200E — это высокоточный, производительный и эффективный ручной лазерный сканер. Устройство оснащено высокочастотным LiDAR-сенсором, двумя панорамными камерами с разрешением 12 Мп, встроенным ГНСС-модулем и мощным вычислительным блоком. Такое оснащение обеспечивает принципиально новый уровень сбора геопространственных данных.
Мобильный сканер SLAM 200E — профессиональное оборудование, предназначенное для задач картографирования в условиях отсутствия ГНСС-сигнала. Сканер обеспечивает относительную точность до 5 мм на расстоянии до 60 метров и абсолютную точность до 2 см.
Наличие встроенного вычислительного блока позволяет выполнять обработку данных в режиме реального времени одновременно со сбором, картографированием и наложением цветовой информации. В случае подключения подключения антенны ГНСС возможна работа с абсолютными координатами в реальном времени.
При использовании приложения SLAM Instant APP возможно построение карт сразу после завершения измерений, включая данные о точках, линиях, площадях и объемах. Также для задач отдельных отраслей реализована функция формирования отчетов об измерениях на месте проведения работ.
SLAM 200E — обновленная версия лазерного сканера первого поколения SLAM 100. Модель сохранила ключевые характеристики предшественника и получила новые возможности: продолжение сканирования с предыдущего захода, поддержку 3DGS и другие функции. Эти улучшения делают мобильный сканер SLAM 200E ещё более удобным и эффективным инструментом для высокоточных измерений.
2. Параметры сканера SLAM 200E
Основные характеристики
| Вес устройства | - 1,6 кг (сканер) - 2,1 кг (со встроенной батареей и основанием) |
| Габариты | 404 мм × 170 мм × 188 мм (со встроенной батареей и основанием) |
| Мощность | 26 Вт |
| Память | 512Гб SSD |
| Литиевая батарея | SP30 |
| Время работы на литиевой батарее | 70 мин (только SLAM200E) |
| Рабочая температура | -20°C ~ 50°C |
| Влажность | <95% |
| Класс защиты | IP54 |
Лазер
| Длина волны | 905 нм |
| Класс лазера | Класс 1 |
| Радиус действия | 0,05-120 м |
| Угол обзора | 360°H, 270°V |
| Частота точек | - 320 тыс. точек/с (версия с 16 лазерными линиями) - 640 тыс. точек/с (версия с 32 лазерными линиями) |
Камера
| Разрешение каждой камеры | 12 Мп |
| Угол обзора | 210° (на камеру) |
Модуль ГНСС
| Спутниковые системы | > ГЛОНАСС | GPS | GALILEO | BDS | QZSS |
| Точность позиционирования (RTK) | - Горизонтальная: 0,8 см + 1 ppm - Вертикальная: 1,5 см + 1 ppm |
Высокоточный IMU
| Нестабильность смещения | 0,5°/ч (Allan Variance при 25 ℃) |
| Случайное блуждание угла (ARW) | 0,025°/√ч |
Интерфейсы
| Type-C1 | Зарядка | OTG | внешний источник питания 20 В |
| Type-C2 | SSD |
| Wi-Fi | Поддерживается |
| Bluetooth | Поддерживается |
Точность результатов в режиме реального времени
| Абсолютная точность (RMSE) | 3 см |
| Относительная точность (RMSE) | 2 см на 100 м |
| Толщина облака точек | 2 см |
Точность результатов постобработки
| Абсолютная точность (RMSE) | 2 см (типичная) |
| Относительная точность (RMSE) | ручной режим с использованием контрольных точек: - 1 см на 100 м - 5 мм на 60 м |
| Cреднеквадратичная ошибка (RMSE) | 2 см (двойное сканирование RTK без прерываний) |
| Толщина облака точек | 0,5 см (толщина плоскости облака точек в пределах 50 м от центра одометрии) |
[1] Относительная точность: типичные условия испытаний — площадь 100 м × 100 м.
В режиме RTK относительная точность зависит от качества данных RTK и условий на местности.
3. Компоненты сканера

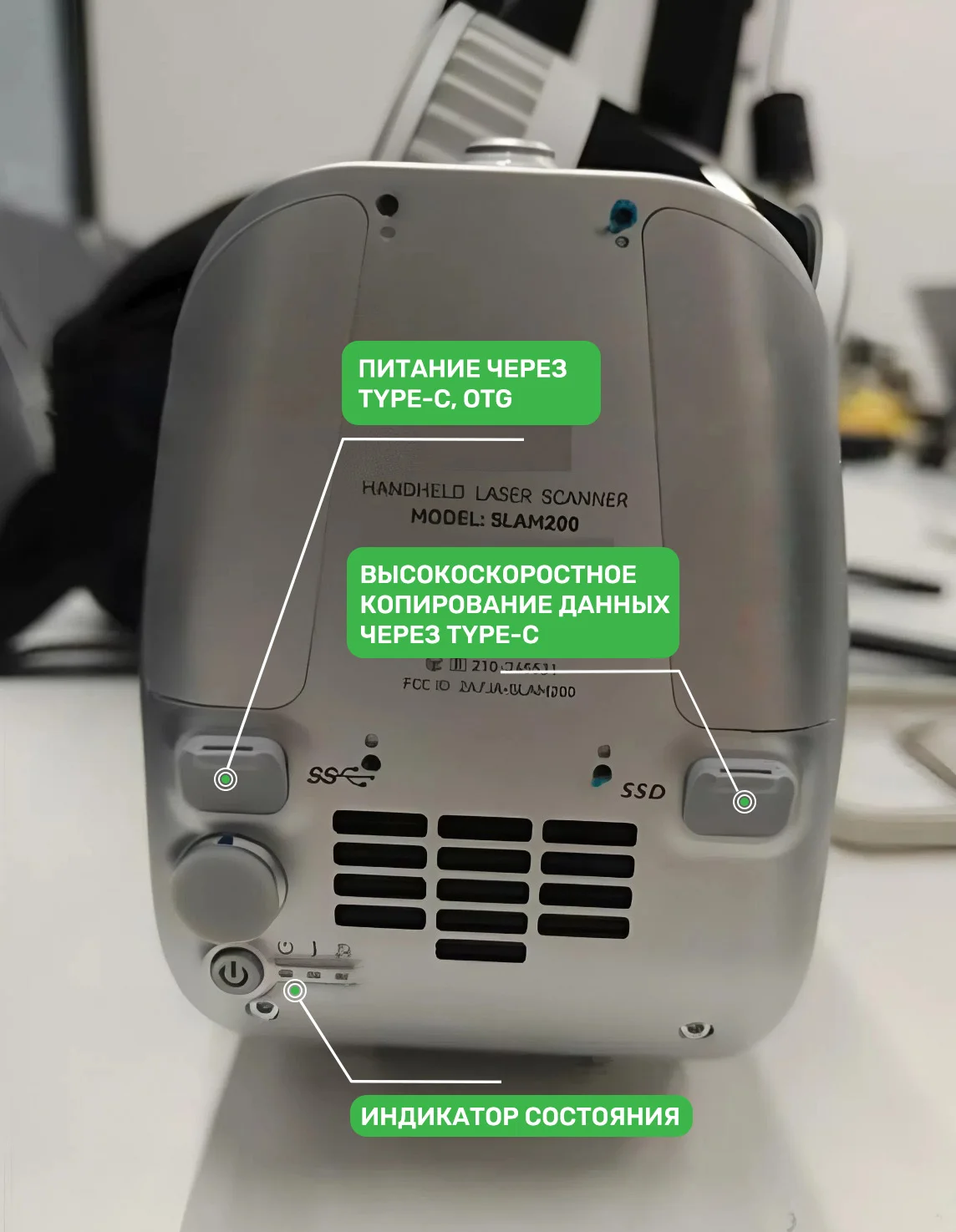
Изображения 3-4. Основные компоненты сканера SLAM 200E
4. Особенности SLAM 200E
4.1. Сверхвысокая точность измерений
Мобильный сканер SLAM200E — это картографическое высокоточное оборудование геодезического класса. При работе с данным инструментом обеспечивается относительная точность 5 мм на расстоянии до 60 метров и 1 см на дистанции до 100 метров. В случае подключения ГНСС антенны или использования опорных точек (GCP) достигается абсолютная точность до 2 см.
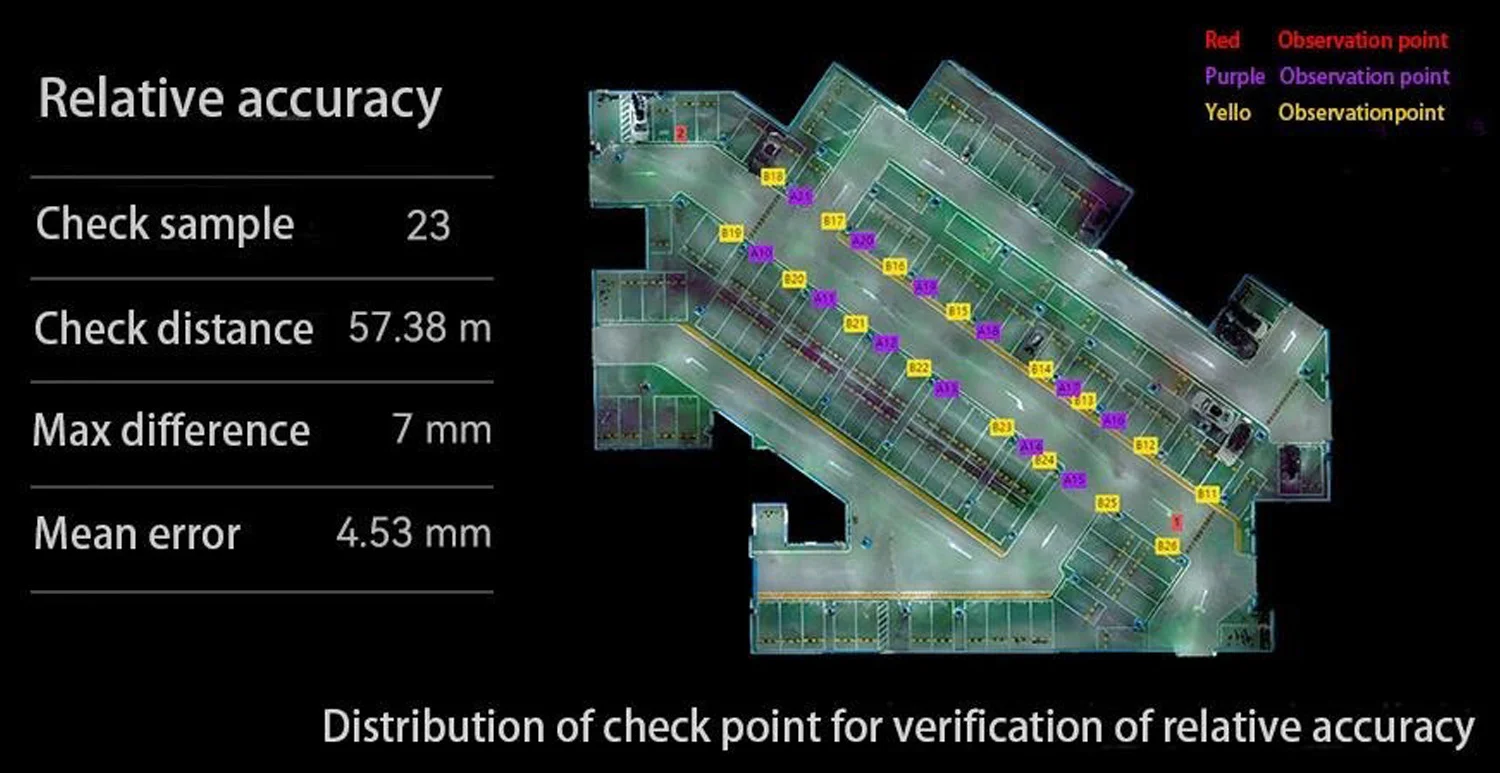
Изображение 5. Распределение контрольных точек для проверки относительной точности.
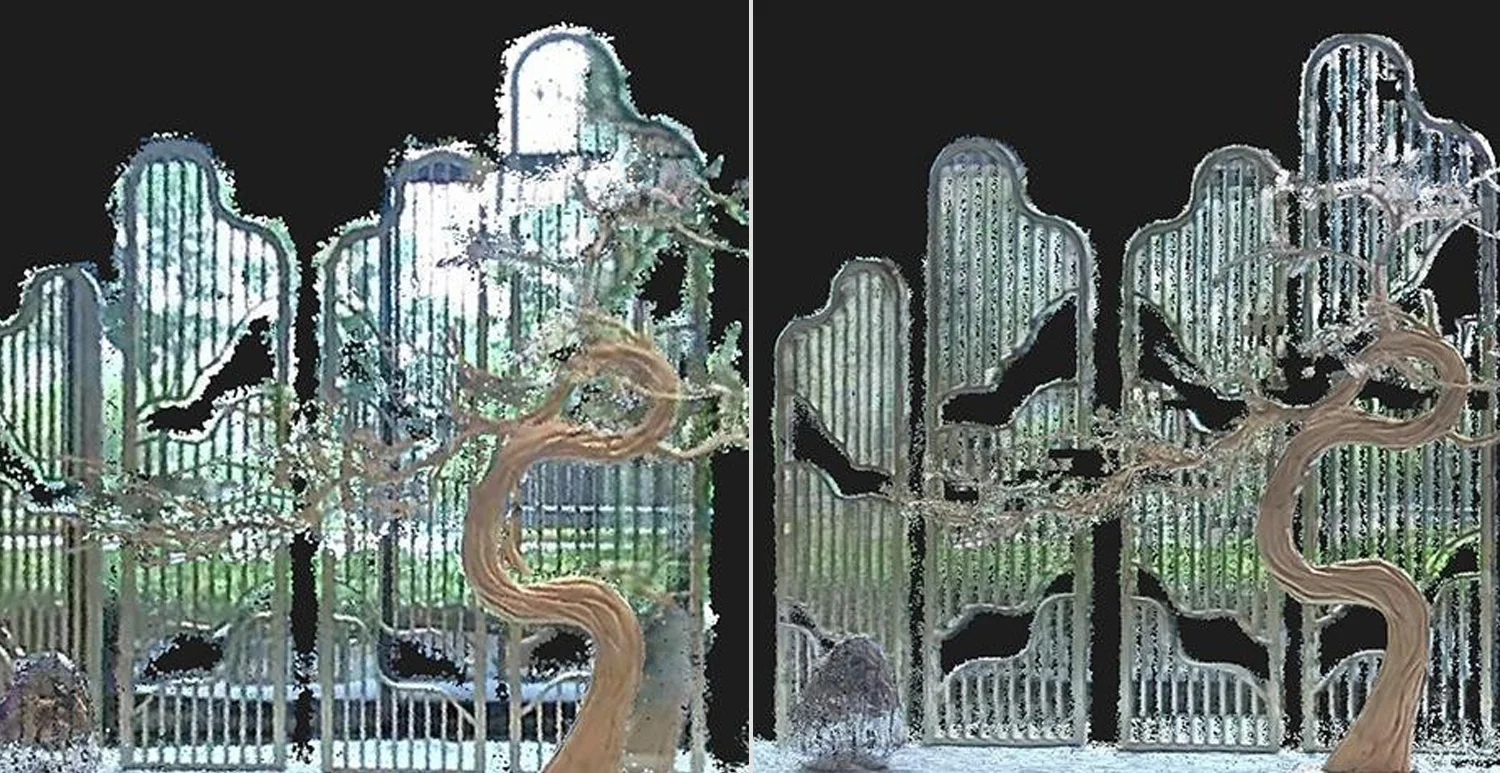
4.2. Съемка в реальном времени
Сканер SLAM 200E позволяет практически мгновенно получать детализированные карты и высокоточные цветные облака точек. При подключении ГНСС антенны возможно формирование облаков точек в режиме реального времени с абсолютными координатами, что значительно повышает эффективность выполняемых работ.
Таким образом, сбор облаков точек в режиме реального времени с быстрой последующей обработкой позволяет решать примерно 80% типовых задач в различных сферах, включая изыскательские работы и инженерный мониторинг.

Изображение 6. Сравнение точности полученных данных с использованием ГНСС антенны и без.
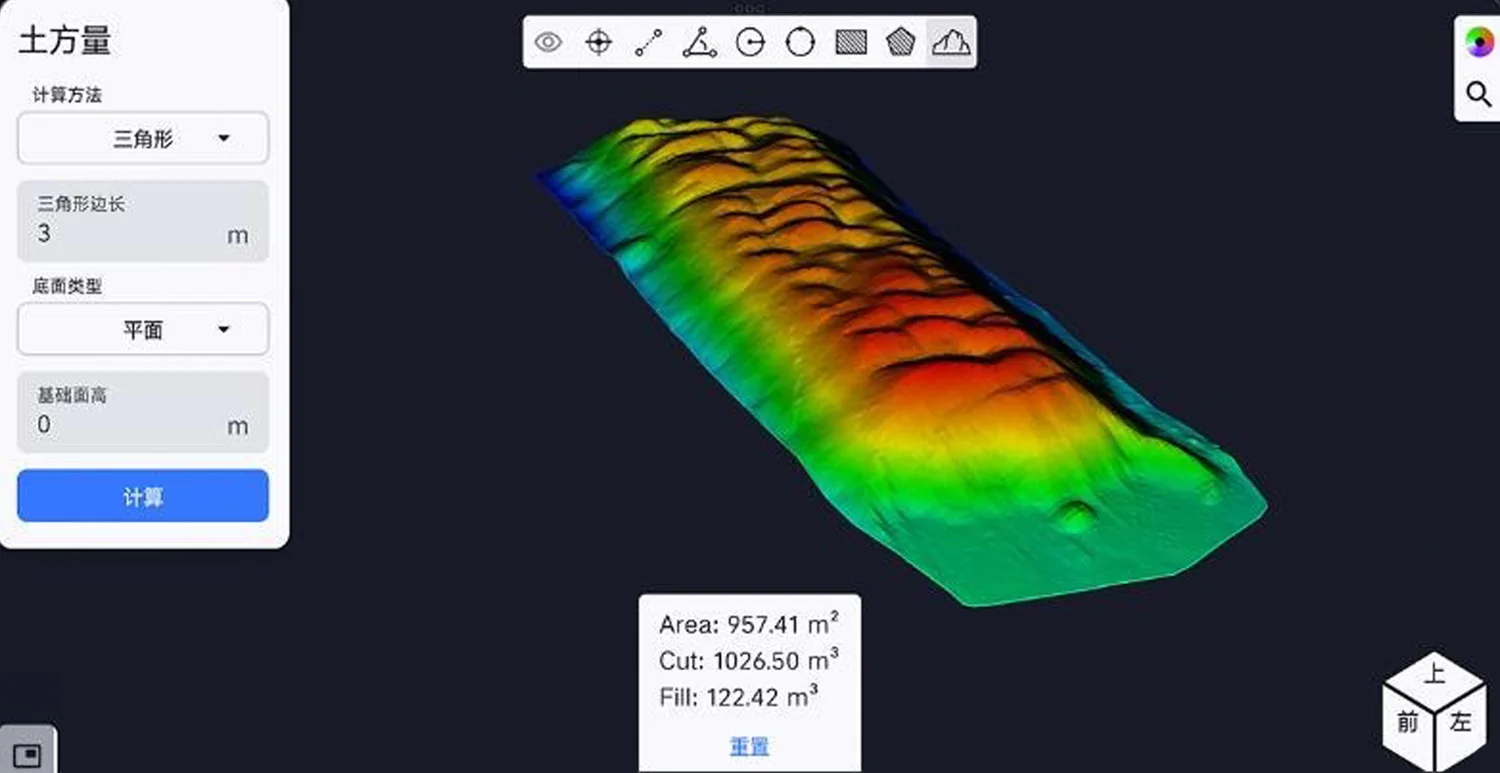
4.3. Реконструкция 3D-карт
SLAM 200E позволяет получать детализированные облака точек с текстурами высокого разрешения, что обеспечивает точное создание 3D-карт на основе геометрии и изображений. Такой подход делает систему оптимальным решением для сбора информации в задачах BIM-моделирования и других проектов, где предъявляются повышенные требования к качеству 3D-данных.

Изображение 7. 3D-реконструкция ландшафтной зоны.
4.4. Панорамная камера
SLAM 200E оснащен двумя панорамными камерами с разрешением 12 Мп. Это обеспечивает угол обзора 360° и детализированный захват текстур. Такой метод съемки позволяет получать реалистичные цветные облака точек и панорамные изображения. Панорамные данные могут использоваться для окрашивания облаков точек, визуального SLAM, генерации панорам, 3D-реконструкции, 3DGS и других задач.

Изображение 8. Пример панорамной съемки.
5. Ключевые особенности сканера SLAM 200E
5.1. Оперативное формирование облаков точек
Обычно преобразование массивов данных облаков точек в конечные результаты требует специализированного ПО для постобработки, квалифицированных сотрудников, дополнительной работы в офисе и значительных временных затрат.
Сканер SLAM 200E был представлен вместе с приложением SLAM Instant APP, обеспечивающим получение 3D-реконструкций практически мгновенно в различных условиях. Таким образом, после сбора данных специалисты могут за считанные минуты в полевых условиях формировать готовые отраслевые отчеты.
Изображение 9. Пример применения приложения SLAM Instant APP - построение ЦМР.
5.2. 3D Gaussian Splatting (3DGS)
Благодаря использованию панорамных изображений, SLAM200E поддерживает генерацию, визуализацию и применение крупномасштабных моделей с технологией 3D Gaussian Splatting. Результаты и промежуточные данные сохраняются в открытых универсальных форматах, что обеспечивает удобную интеграцию со сторонними платформами. Важно отметить, что функция 3D Gaussian Splatting реализована базе ручного сканера и предоставляется бесплатно на весь срок службы устройства.

Изображение 11. Пример построения реалистичной 3D-модели.
5.3. Режим статического сканирования
Режим статического сканирования позволяет получать детализированные и плотные облака точек в сложных условиях. Помимо этого, поддерживается сбор данных в заданном угле обзора с автоматической регистрацией и оптимизацией статических станционных данных. Это дополнительно повышает качество информации и эффективность обработки.
Изображение 12. Сравнение данных, полученных в движении, и данных после добавления результатов статического сканирования.
5.4. Удаленная передача данных
В процессе съемки в реальном времени — особенно в горнодобывающей отрасли, при ликвидации последствий ЧС и в схожих сценариях — ручной сканер SLAM 200E может передавать получаемые результаты напрямую в операционный центр через локальную сеть или интернет. Такой подход сокращает время консолидации данных и ускоряет процесс принятия решений.
Прямая передача данных через интернет
Мобильное устройство подключается к сканеру SLAM 200E и во время работы поддерживает активное соединение, передавая данные в режиме реального времени через интернет. Это обеспечивает мгновенный удаленный доступ к информации с ПК.
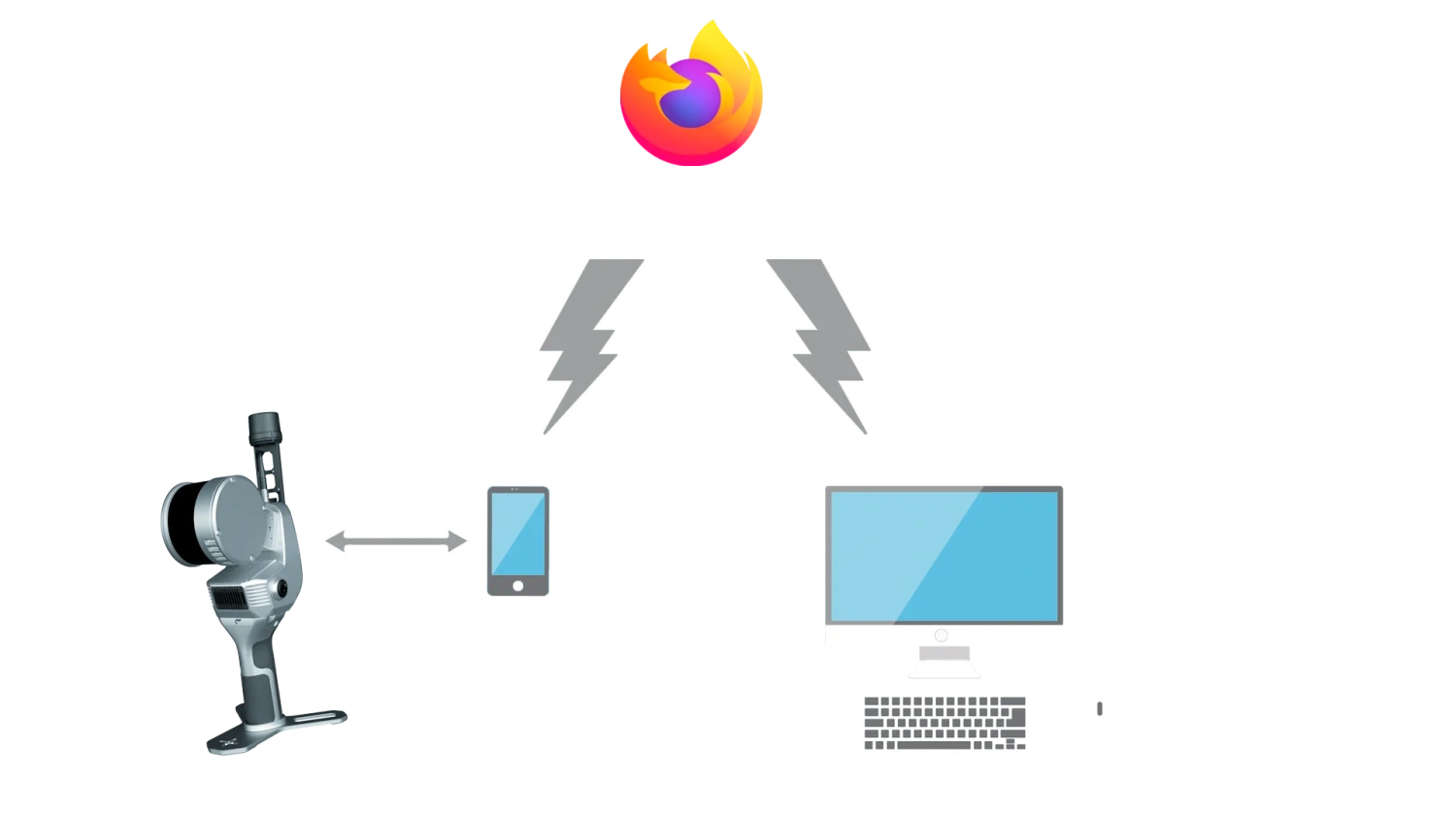
Изображение 13. Передача данных через интернет с использованием мобильного телефона/планшета.
Режим передачи данных через локальную сеть (LAN)
Передача данных через локальную сеть осуществляется при подключении сканера и удаленного ПК к одной локальной сети. При этом данные не передаются через публичный интернет.
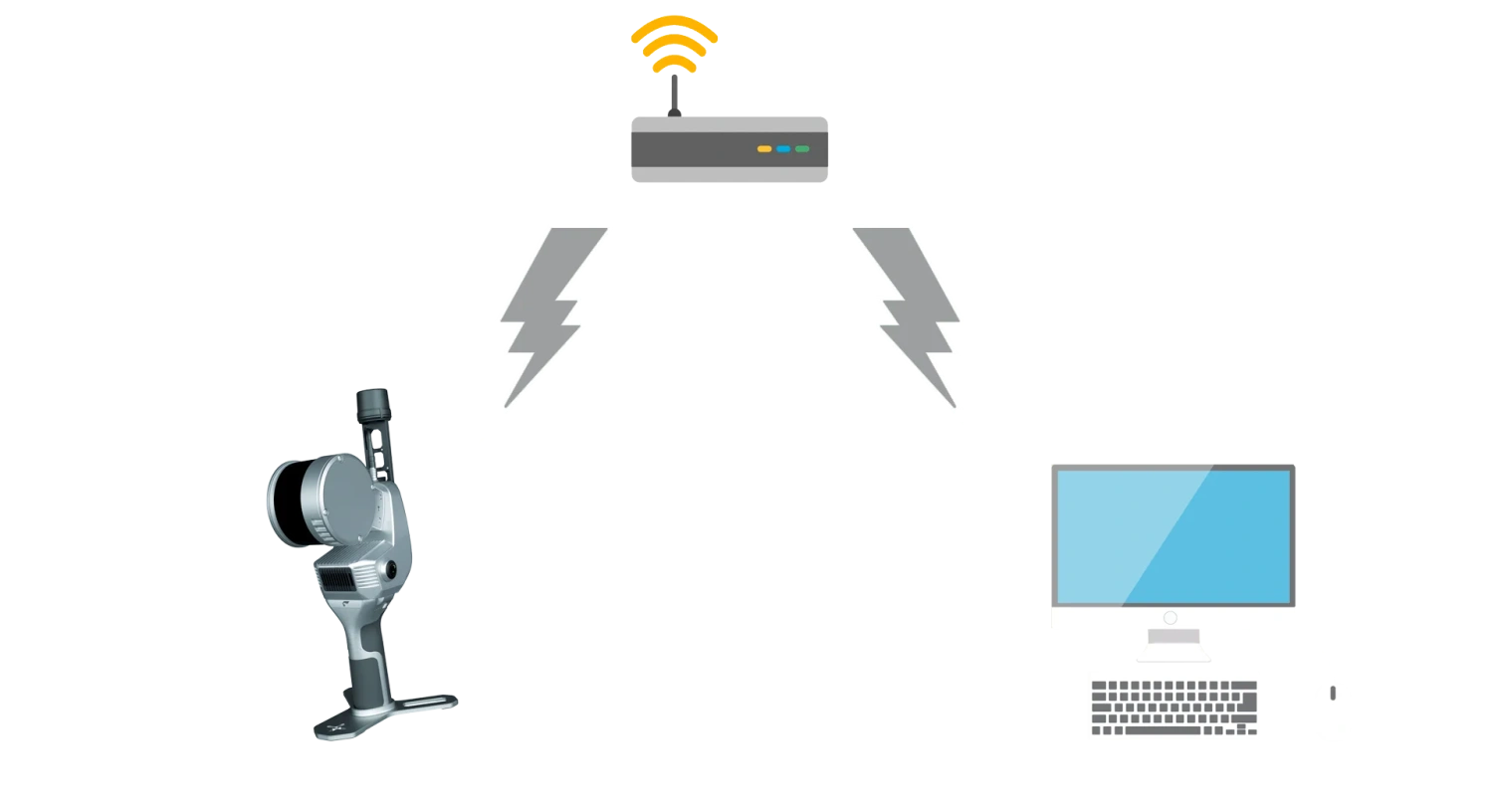
Изображение 14. Общая схема передачи данных через локальную сеть.
Ретрансляция данных по локальной сети
Ретрансляция данных — дополнительная опция для режима LAN. Ручной сканер подключается к локальной сети. При этом удаленный ПК A обеспечивает ретрансляцию/обмен данными, а удаленный ПК B в той же сети получает доступ к данным в реальном времени с помощью кода ретрансляции.
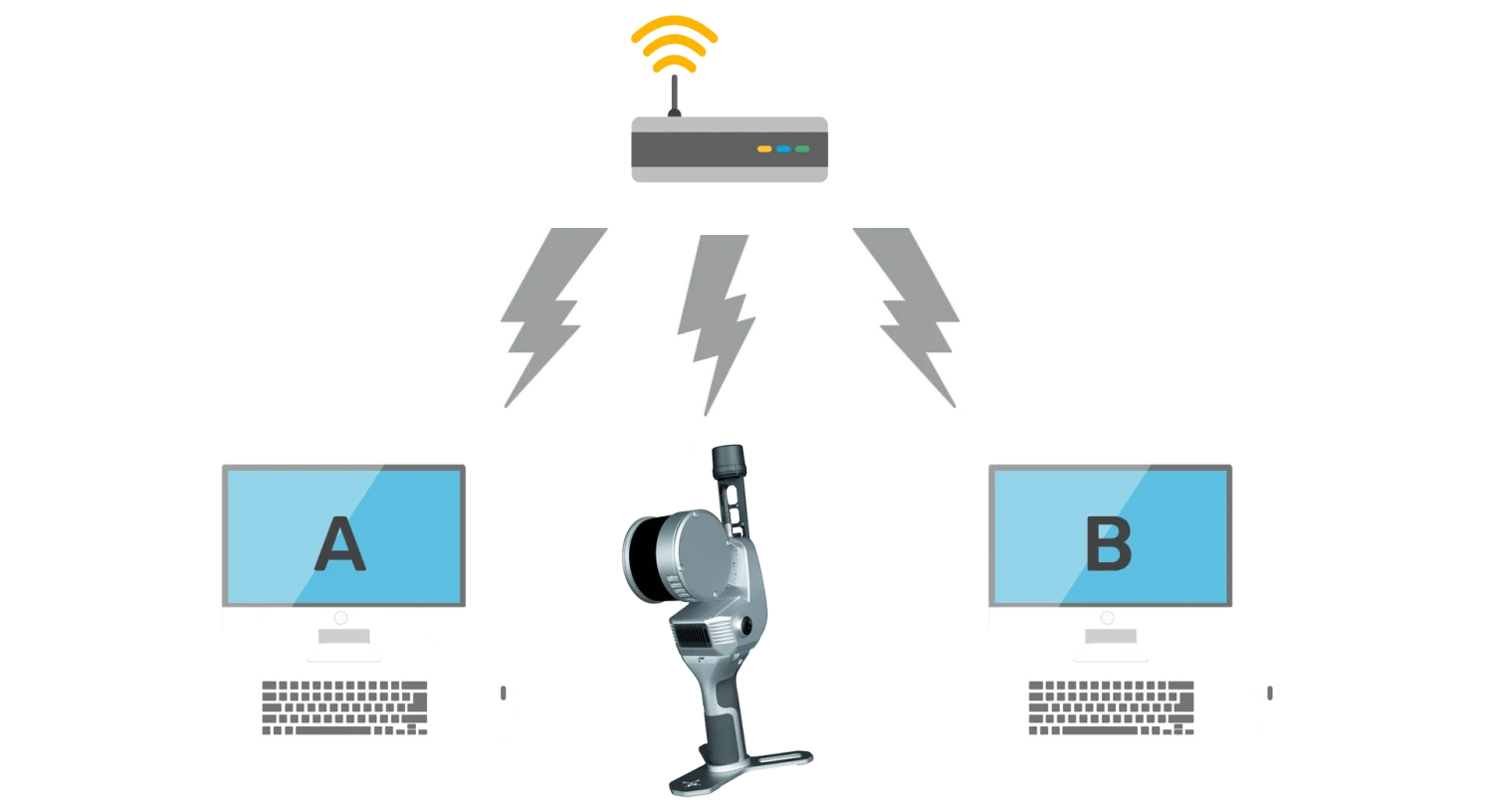
Изображение 15. Общая схема ретрансляции данных.
5.5. Поддержка нескольких платформ
SLAM 200E поддерживает модульный, кроссплатформенный и многозадачный рабочий процесс, легко адаптируясь к установке на рюкзак, автомобильное крепление, нагрудный держатель или штатив.





Изображения 16-20. Варианты крепления SLAM 200E.
6. ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
6.1. Приложение SLAM GO
SLAM GO — приложение для сбора данных с ручных лазерных сканеров, совместимое с системами Android и iOS. Приложение обеспечивает стабильное соединение со SLAM 200E через Wi-Fi или, при необходимости, через мобильную сеть. SLAM GO предоставляет удобное управление оборудованием и проектами, а также мощный функционал для сбора и обработки данных.
Функции:
- Управление устройством и настройками;
- Управление проектами;
- Съемка в реальном времени, просмотр и навигация по данным;
- Настройка и подключение к системе CORS;
- Трансляция данных съемки в реальном времени через интернет и другие функции.
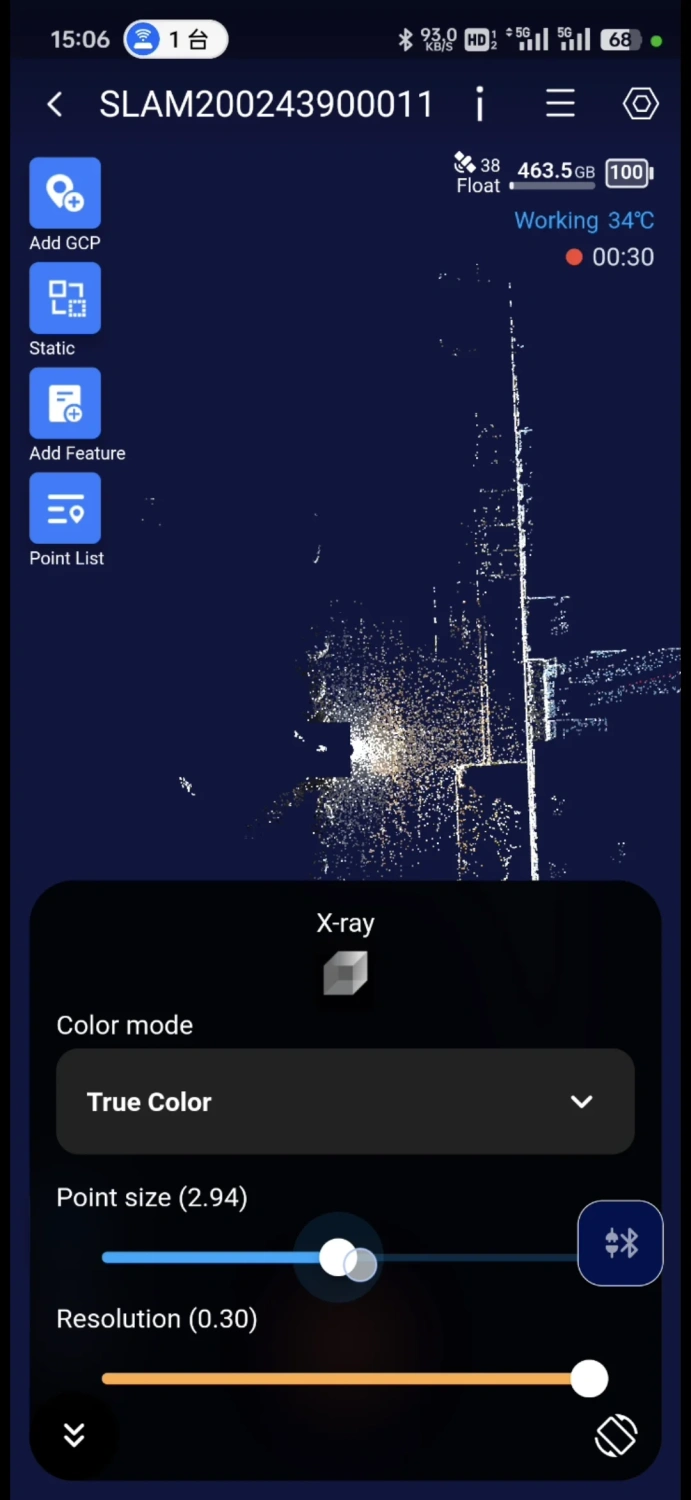
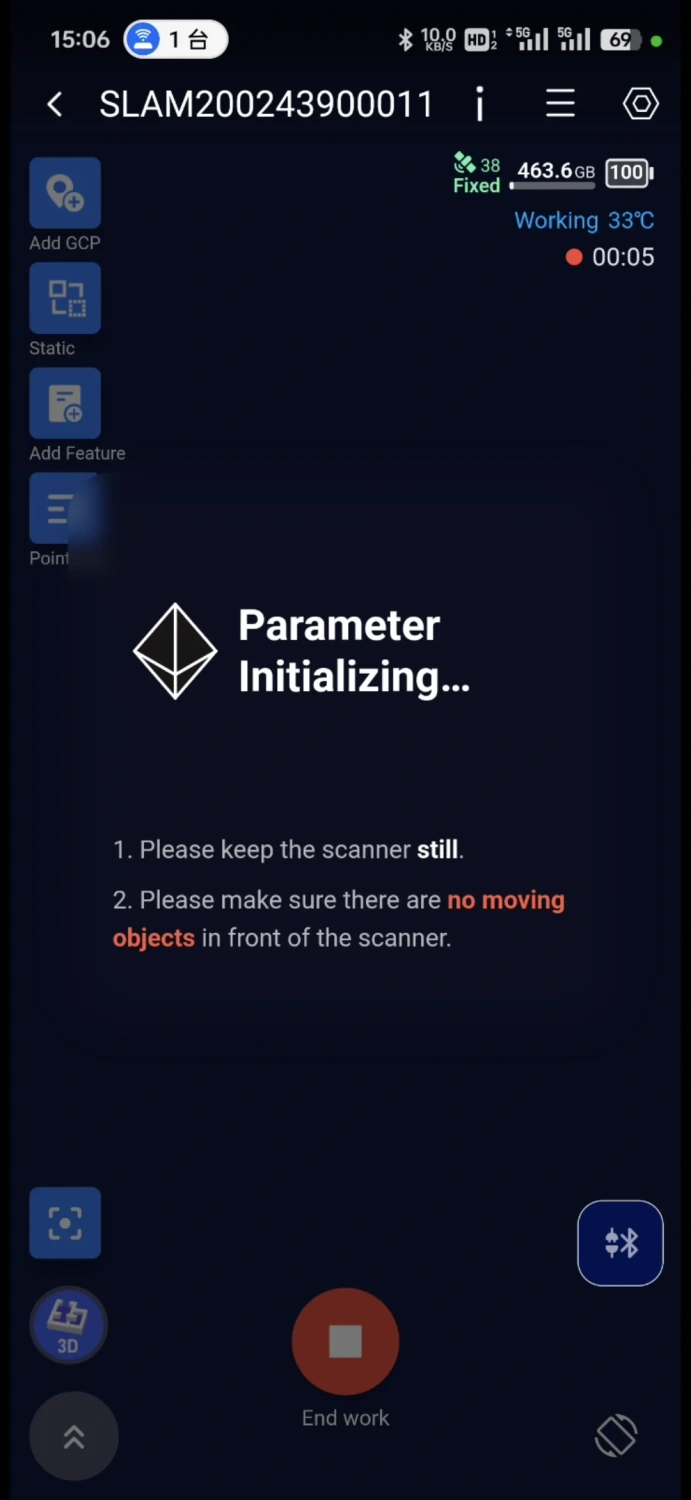
Изображения 21-23. Интерфейс SLAM Instant App и облака точек.
6.2. SLAM GO POST Pro
SLAM GO POST Pro — это программное обеспечение для ПК, поставляемое вместе с ручными лазерными сканерами. Программа поддерживает постобработку данных, собранных SLAM200E, позволяя создавать высокоточные, высокоразрешенные цветные облака точек и локализованные панорамные изображения. Помимо этого, обеспечивается визуализация и оптимизация облаков точек.
Ключевые функции:
- Обработка данных с ручного лазерного сканера;
- Отображение и просмотр массивов облаков точек;
- Окрашивание облаков точек, генерация панорамных изображений и 3DGS;
- Продолжение сканирования с точки остановки.

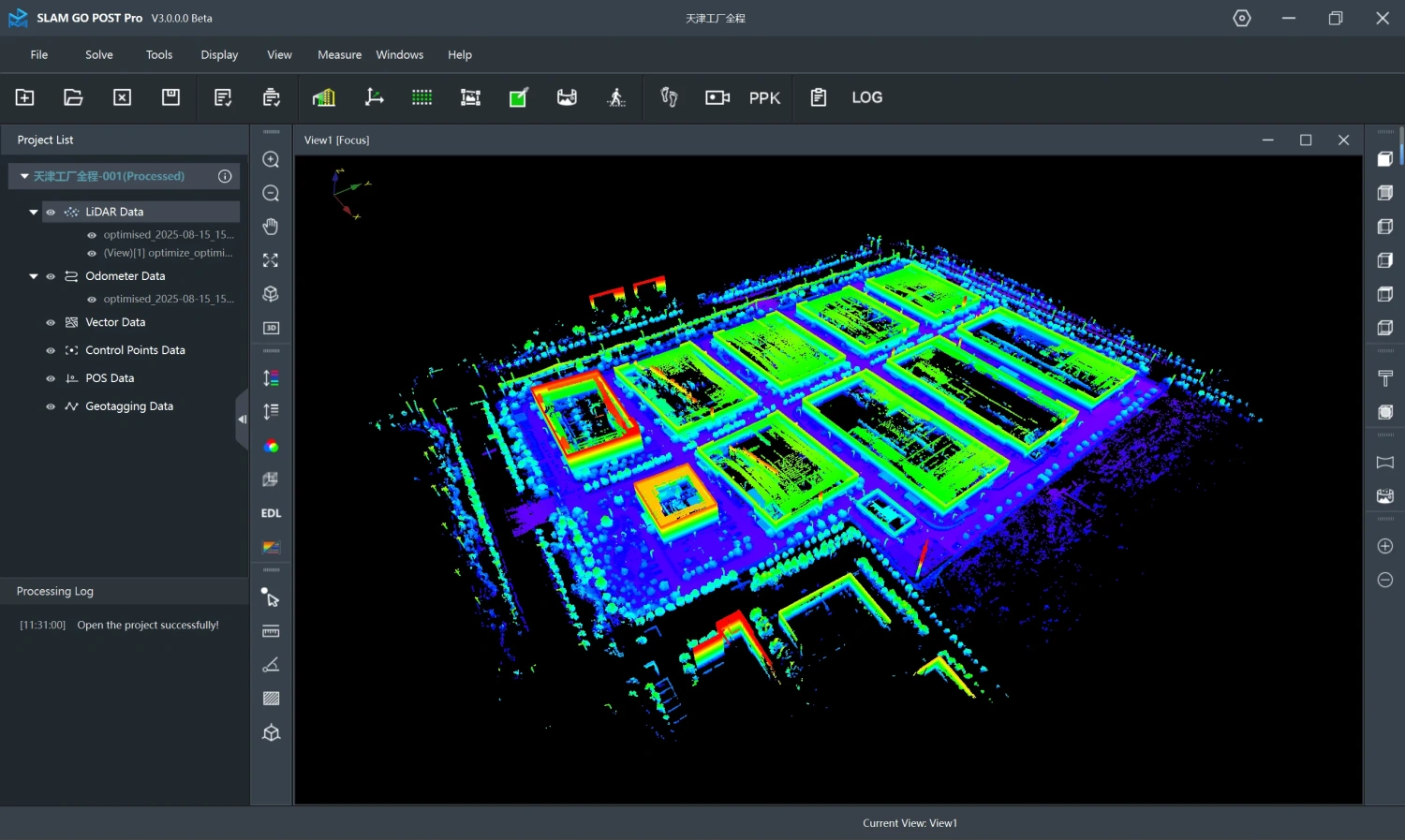
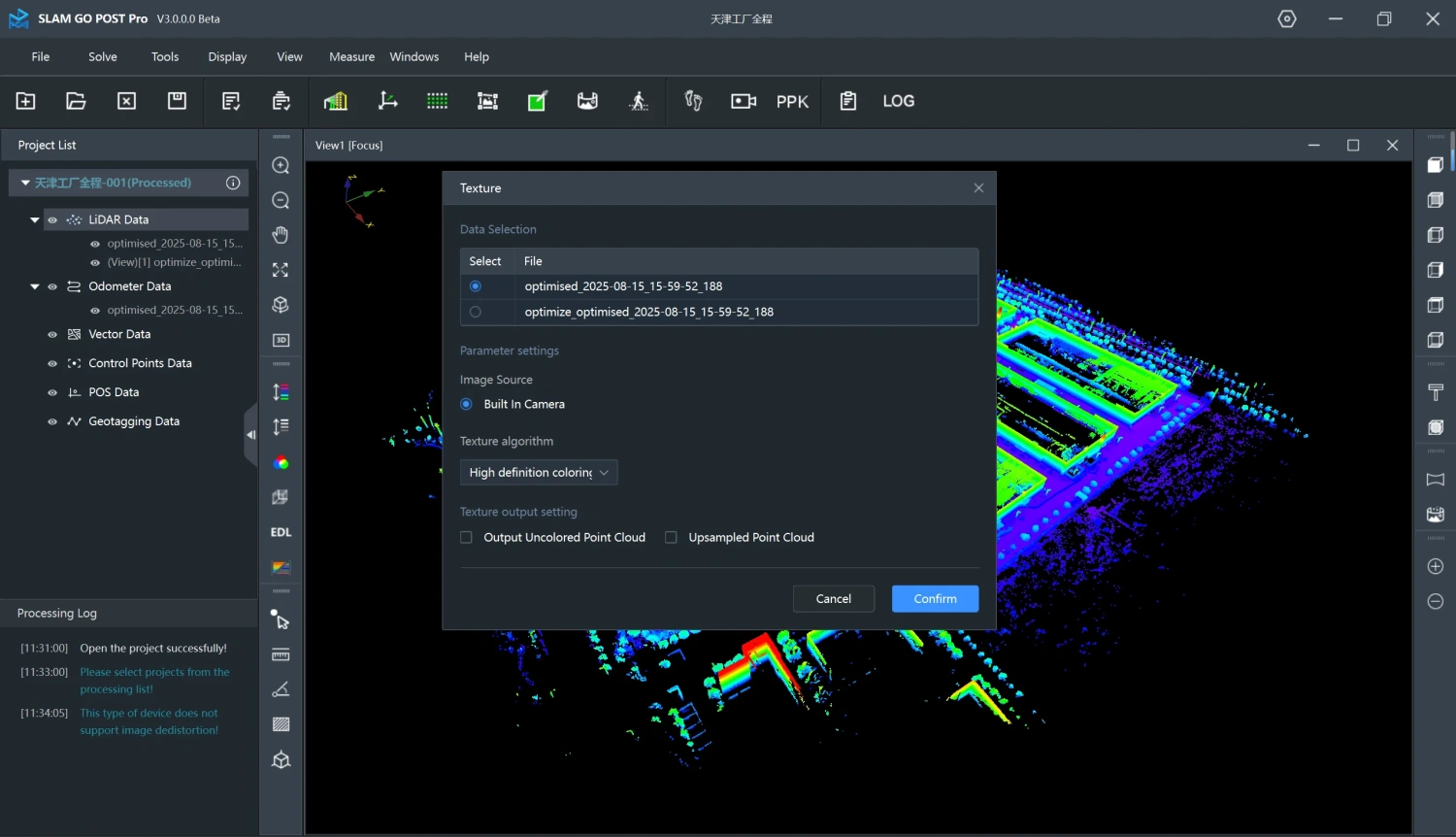
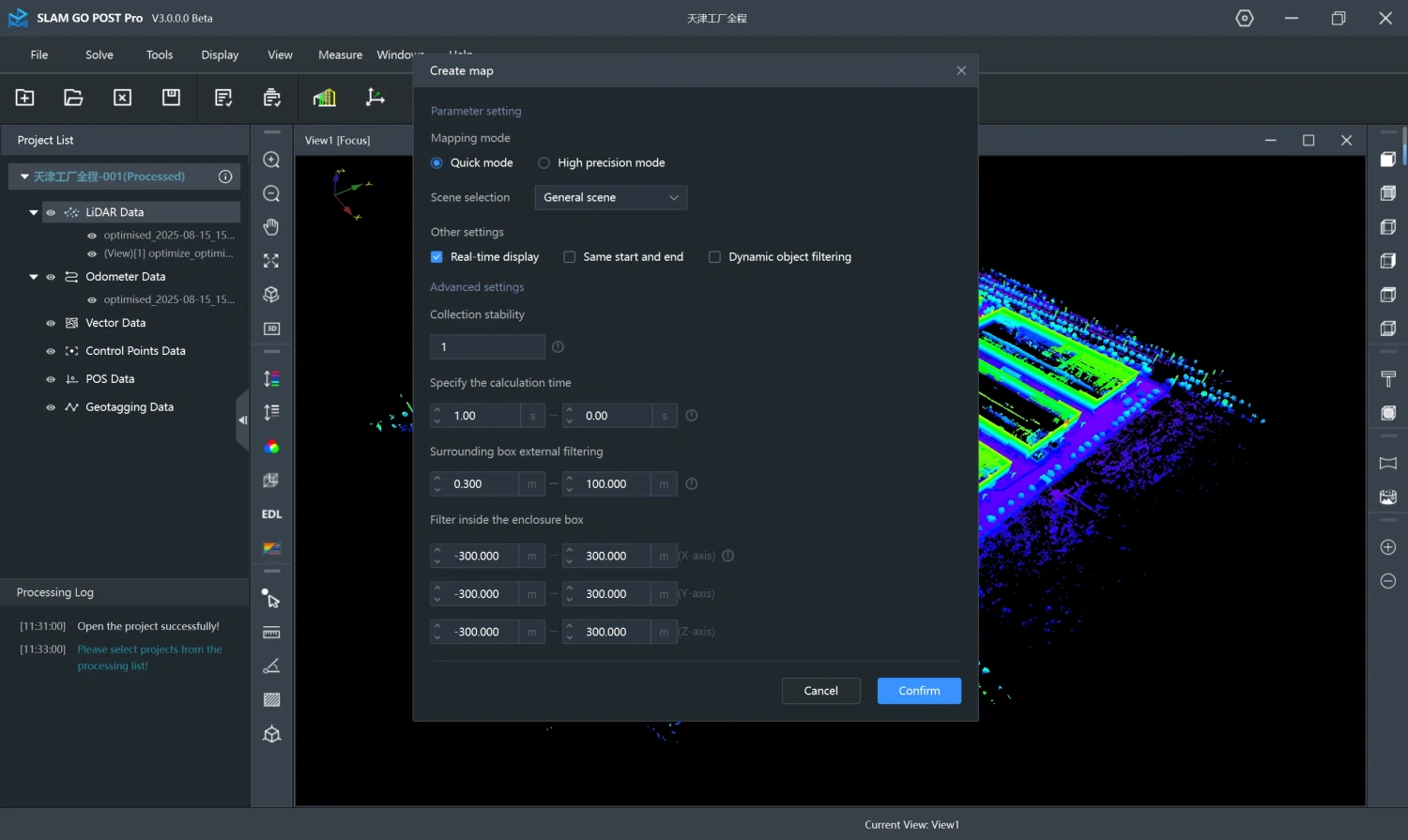
Изображения 24-26. Пример интерфейса SLAM GO POST Pro.
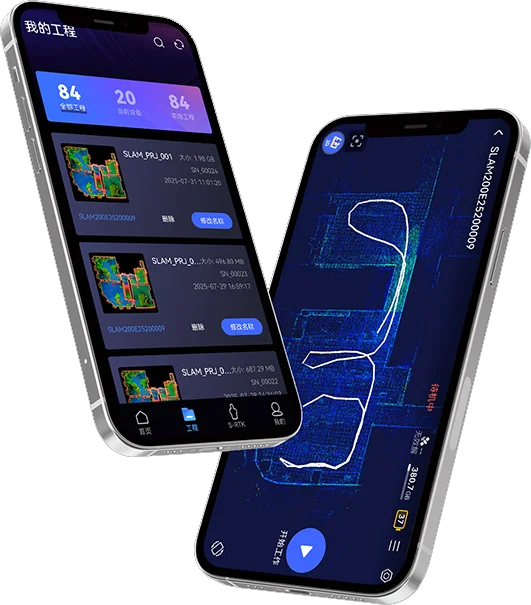
6.3. SLAM Instant App
SLAM Instant App — специализированное приложение для проведения измерений в реальном времени в полевых условиях.
Программа устанавливается на телефон или планшет под управлением Android и позволяет быстро проводить измерения, а после завершения сбора данных формировать отраслевые отчеты.


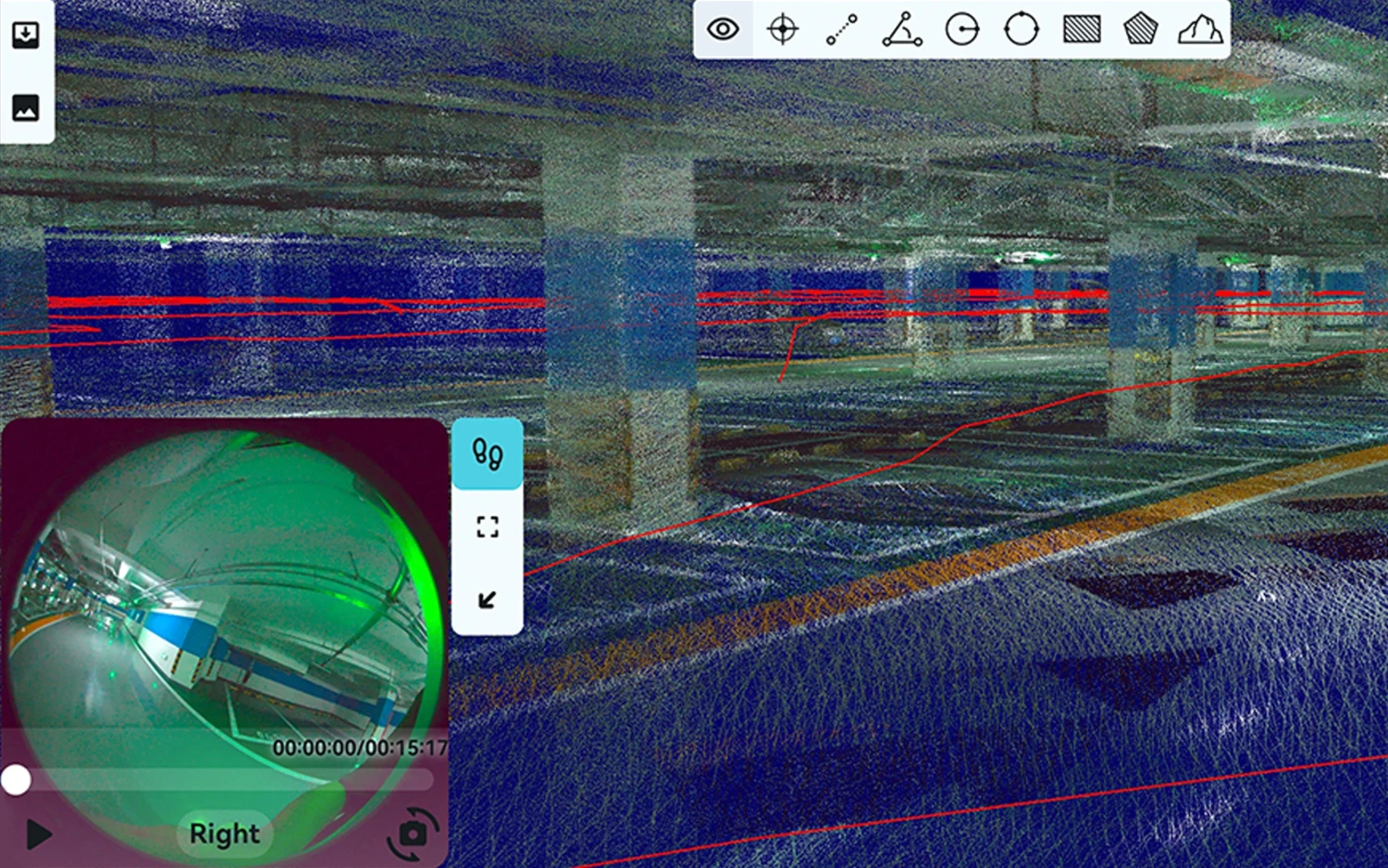
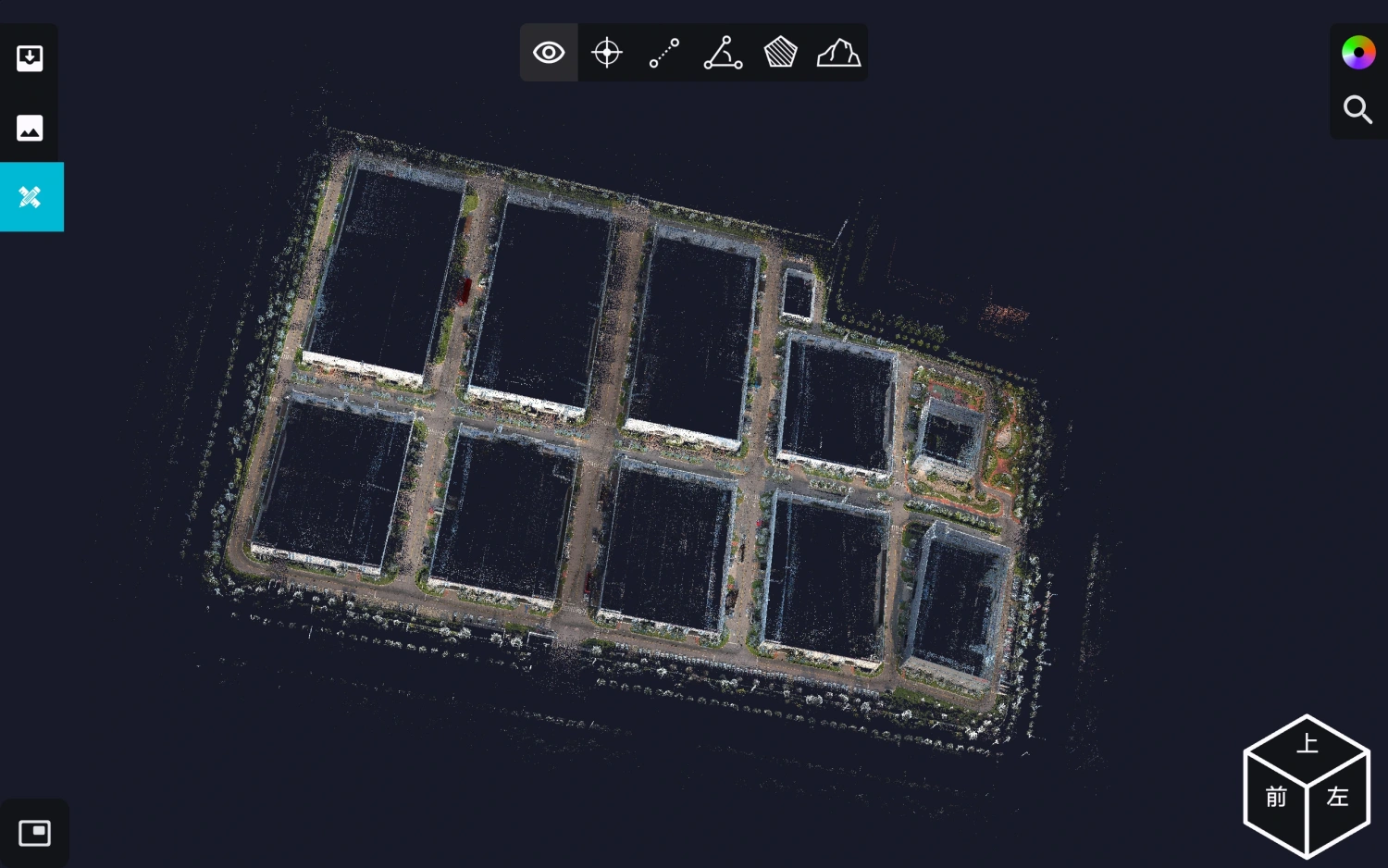
Изображения 27-29. Интерфейс SLAM Instant App и облака точек.
В данный момент приложение SLAM Instant App проходит этап внутреннего тестирования и будет доступен в ближайшее время.
7. Вывод
Ручной мобильный сканер SLAM 200E является эффективным и технологичным решением для задач 3D-картографирования в условиях отсутствия сигнала ГНСС. Сочетание высокой точности измерений, возможности работы в реальном времени и поддержки современных технологий, таких как 3D Gaussian Splatting, позволяет применять данное оборудование для решения широкого круга задач.
Ключевые преимущества модели — оперативное получение результатов, разнообразие режимов работы и кроссплатформенность. Все это делает сканер практичным инструментом для геодезии, строительства, горной промышленности и других отраслей.
Отправить запрос на сканер SLAM 200E можно на странице оборудования.
