

Содержание
Введение
Современные технологии лазерного сканирования открывают новые возможности для мониторинга карьеров, обеспечивая быструю и высокоточную съемку, контроль объемов добычи и анализ состояния откосов. Среди наиболее эффективных решений для этих задач — мобильные сканеры SLAM 100, SLAM 200 и SLAM 2000. Их ключевые преимущества — мобильность, исключительная точность измерений и гибкость работы как с использованием ГНСС, так и в условиях полного отсутствия (или глушения) спутникового сигнала.

Рисунок 1. Сканер SLAM 100.
В данной статье мы рассмотрим процесс проведения высокоточных геодезических работ на примере крупного участка площадью свыше 100 гектар с перепадом высот более 30 метров. Основное внимание будет уделено методике мобильного лазерного сканирования с использованием системы крепления на рюкзак сканера SLAM 100, оснащенного RTK-модулем для получения высокоточной траектории в режиме реального времени.
Особое внимание мы уделим:
- методологии проведения полевых работ;
- характеристикам полученных цифровых данных;
- сравнительному анализу эффективности SLAM-технологии с традиционными методами геодезической съемки.
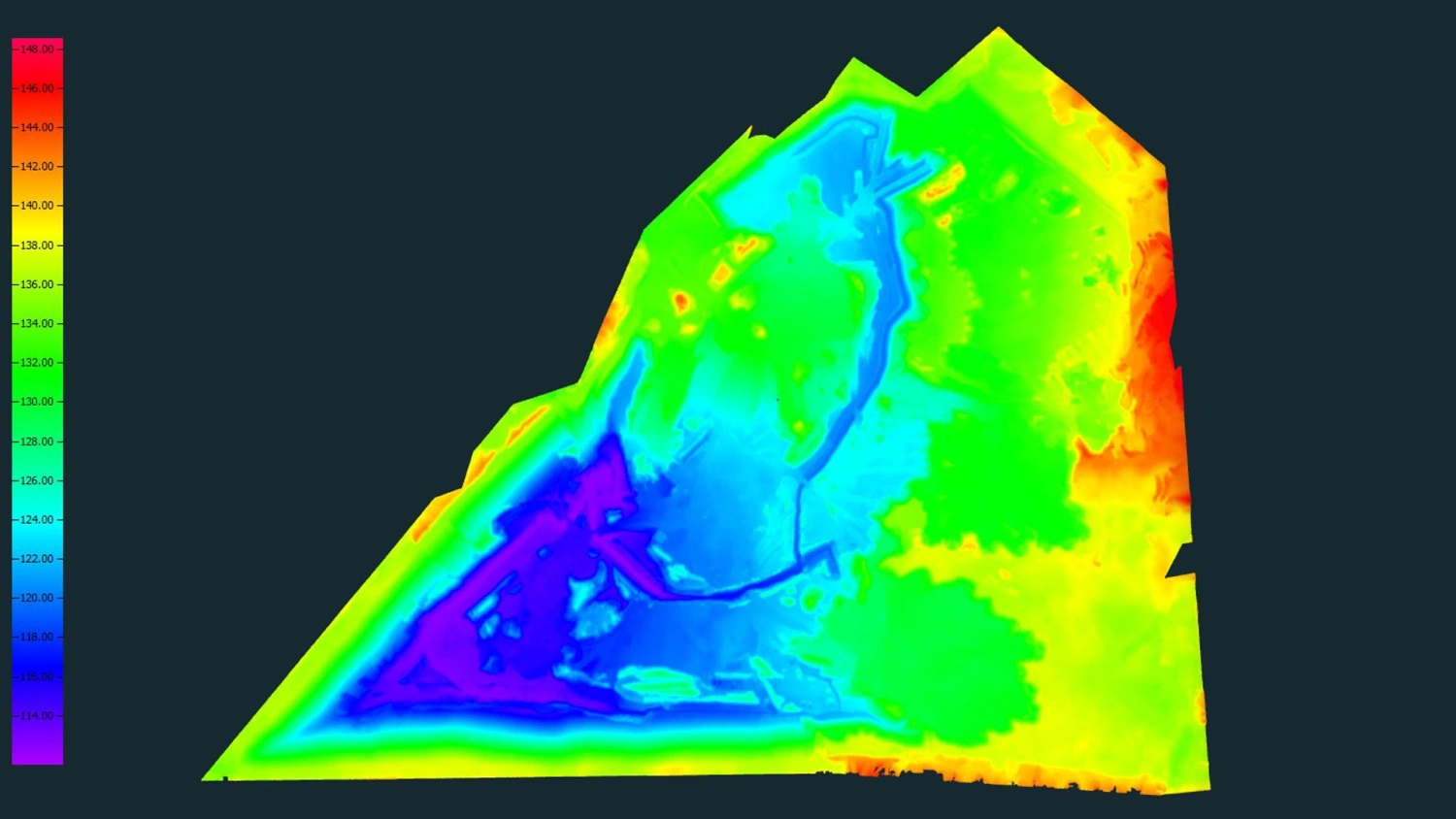 Рисунок 2. Общий вид карьера
Рисунок 2. Общий вид карьера
Почему для сканирования карьера был выбран SLAM 100?
Ранее мониторинг карьера успешно осуществлялся с применением аэрофотосъемки (АФС), что обеспечивало высокую эффективность при минимальных трудозатратах и оперативном получении результатов. Однако на текущем этапе проведение аэросъемки стало технически невозможным из-за полного отсутствия ГНСС-сигнала на высотах от 10 метров и выше.
Для решения этой задачи и оптимизации производственных процессов был выбран инновационный подход -- мобильное лазерное сканирование с использованием системы SLAM 100. Этот метод идеально соответствует специфике действующих карьеров, где:
- поверхность постоянно изменяется из-за интенсивной работы тяжелой техники;
- требуется оперативное обновление данных;
- существуют сложные условия для позиционирования.
Ключевые преимущества SLAM 100 в карьерных условиях:
- Работа в полном отсутствии ГНСС-сигнала;
- Устойчивость к временным потерям позиционирования;
- Эффективность в зонах с ограниченной видимостью спутников;
- Кратное увеличение скорости съемки по сравнению с традиционными методами.
Благодаря применению этой технологии, весь комплекс полевых работ был выполнен в рекордно короткие сроки -- менее чем за 2 рабочих дня, что значительно превосходит возможности классических геодезических методов.
Как проводилась съемка карьера?
Подготовительный этап
Перед началом полевых работ был выполнен комплекс подготовительных мероприятий, обеспечивающих максимальную эффективность съемочного процесса:
- Техническая подготовка оборудования:
- Полная зарядка всех аккумуляторных блоков сканера SLAM 100
- Подготовка мобильного устройства (смартфона) с установленным специализированным ПО SLAM GO для мониторинга процесса сканирования в реальном времени
- Планирование маршрутов:
- Разработка оптимальных траекторий передвижения оператора
- Визуализация зон покрытия с учетом необходимости полного охвата:
- рабочих уступов
- бровок откосов
- подошв карьера
- Минимизация потенциальных "слепых зон" сканирования
- Создание опорной геодезической сети:
- Маркировка и планово-высотная привязка опознаков для контроля точности конечных данных.
 Рисунок 3. Изображение опознака в облаке в естественных цветах с информацией о плотности точек.
Рисунок 3. Изображение опознака в облаке в естественных цветах с информацией о плотности точек.

Рисунок 4. Рекогносцировка на местности.
Этап сканирования
 Рисунок 5. Использование SLAM 100 на рюкзаке с RTK модулем.
Рисунок 5. Использование SLAM 100 на рюкзаке с RTK модулем.
Как отмечалось ранее, сканирование выполнялось с использованием RTK-модуля на базе чипа UNICORE UM-982. Это инновационное позволило: полностью отказаться от создания опорных точек, получать облако точек непосредственно в местной системе координат (МСК 69, зона 2), обеспечить точность позиционирования за счет поправок от референсной станции EFT-CORS (г. Тверь, станция TVER), включенной в федеральный фонд пространственных данных
Перед началом работ была проведена контрольная проверка точности на двух реперах долговременной сохранности, заранее установленных заказчиком в районе проведения съемки. Расстояние до базовой станции составляло 13 км, что не повлияло на качество получаемых данных.
После получения фиксированного RTK-решения весь карьер площадью 100 га был разбит на логические участки для последовательного сканирования и оператор с системой крепления на рюкзак SLAM 100 и RTK-модулем, выполнил серию проходов общей протяженностью около 28 км.
В процессе выполнения проходов ГНСС-сигнал оставался стабильным на протяжении всего маршрута, за исключением одного участка длиной 250 метров и для того, чтобы у нас была возможность проконтролировать данные на таких участках применялась методика перекрывающихся маршрутов. Так же во время прохода данные отображались в реальном времени через приложение SLAM GO, что позволяло оперативно контролировать зоны покрытия и оперативно устранять возможные пропуски.
Второй день работ сопровождался сложными метеоусловиями, периодическая морось сменялась интенсивными ливнями. Требовались технологические перерывы для сохранения качества данных. Несмотря на это, все запланированные работы были выполнены в установленные сроки.

Рисунок 6. Использование SLAM 100 на рюкзаке с RTK модулем
Видео 1. Этап сканирования
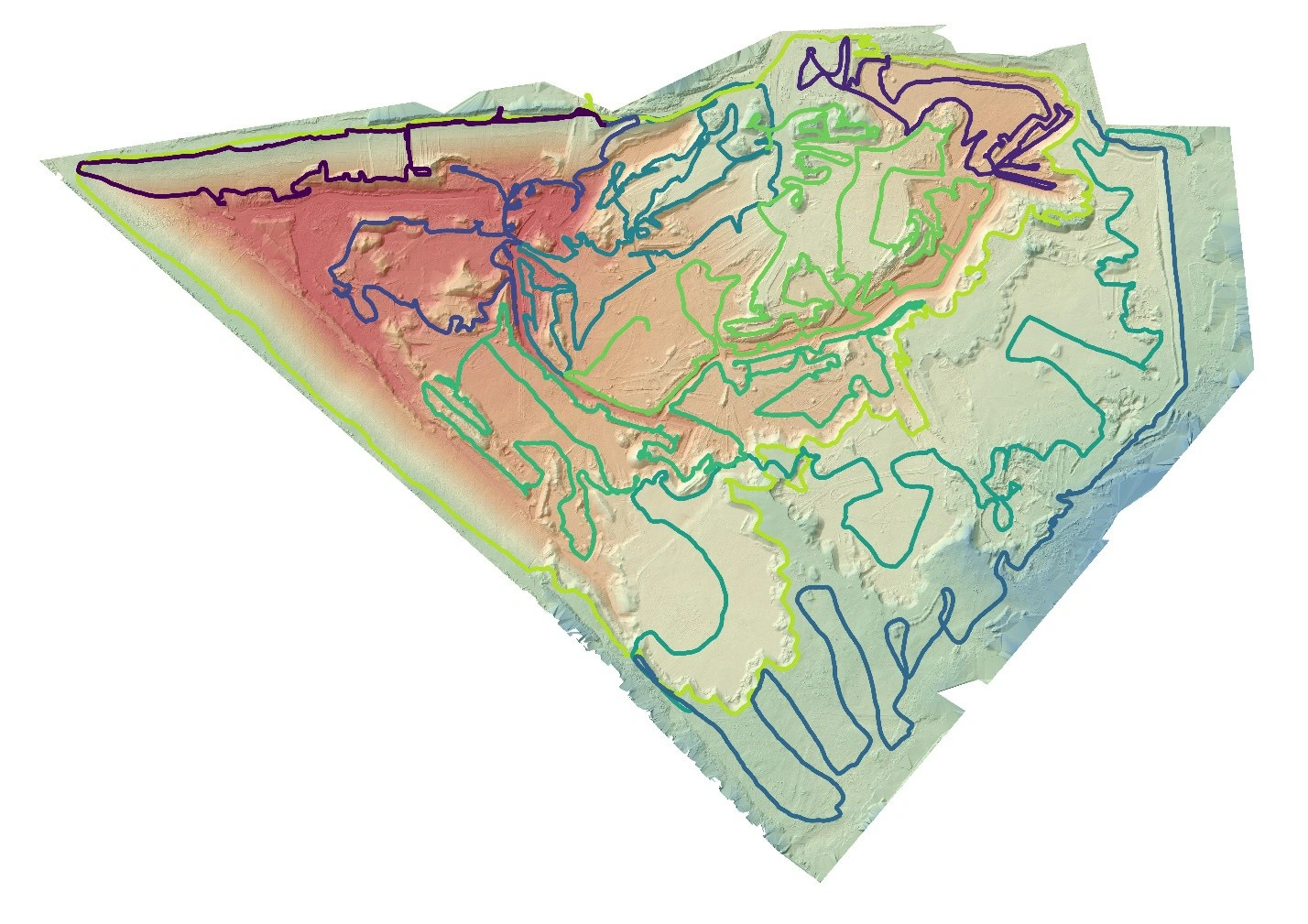 Рисунок 7. Общий план и все траектории проходов.
Рисунок 7. Общий план и все траектории проходов.
Этап постобработки данных
1. Генерация и обработка облака точек. Первичная обработка данных включала:- Автоматизированную генерацию плотного облака точек в штатном программном обеспечении SLAM GO Post;
- Оптимизацию пространственного распределения точек
- Точное ориентирование данных в заданной системе координат с использованием RTK-траектории
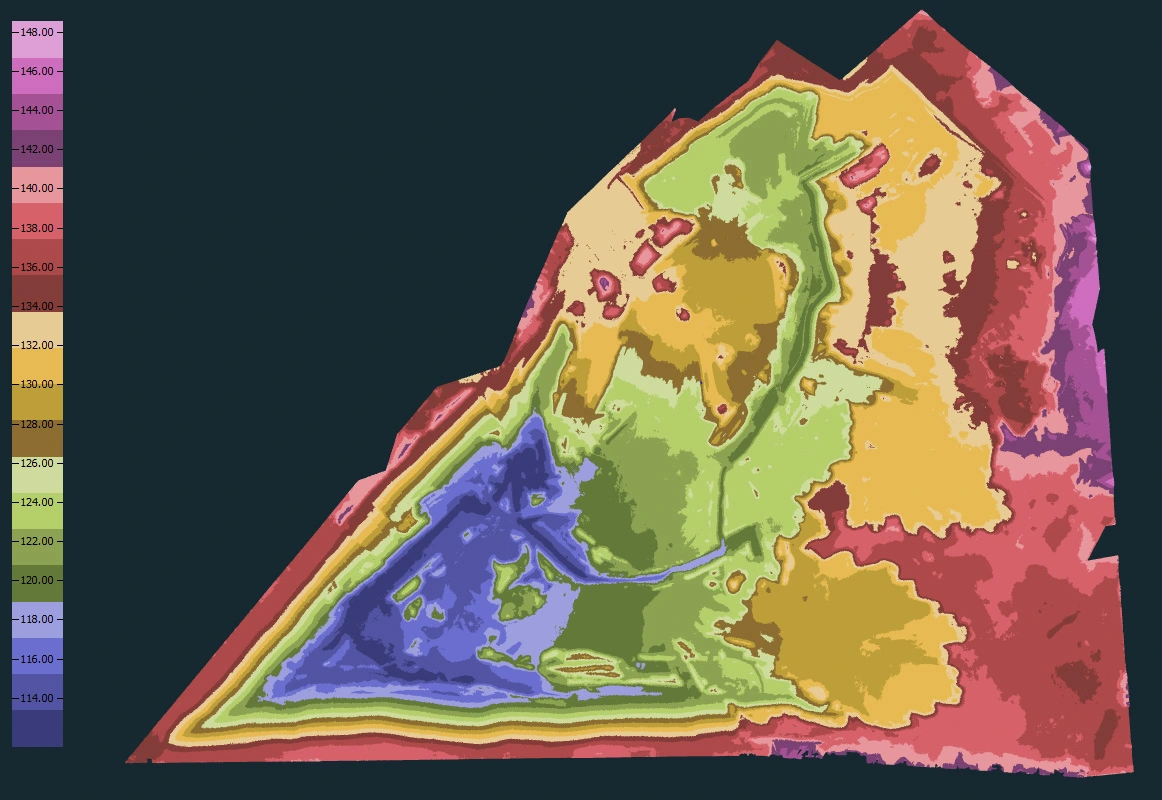 Рисунок 8. Облако точек по высоте.
Рисунок 8. Облако точек по высоте.
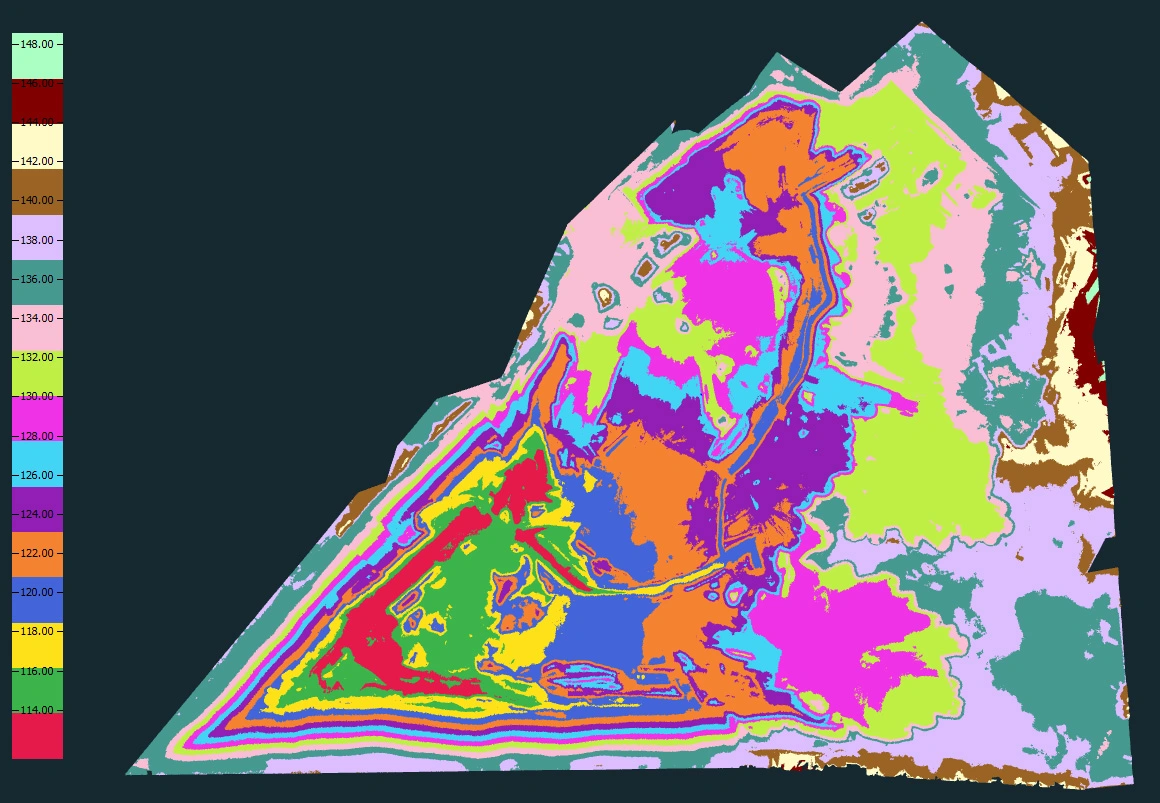 Рисунок 9. Облако точек по высоте.
Рисунок 9. Облако точек по высоте.
- Удаление динамических объектов (строительная техника)
- Исключение растительности и артефактов сканирования
- Точная классификация точек рельефа
- Построение цифровой модели рельефа (DEM) высокой точности
- Генерация горизонталей:
- Основные с шагом 0.5 метра
- Утолщенные через 2.5 метра
- Создание пикетной сети с плотностью, соответствующей масштабу 1:500
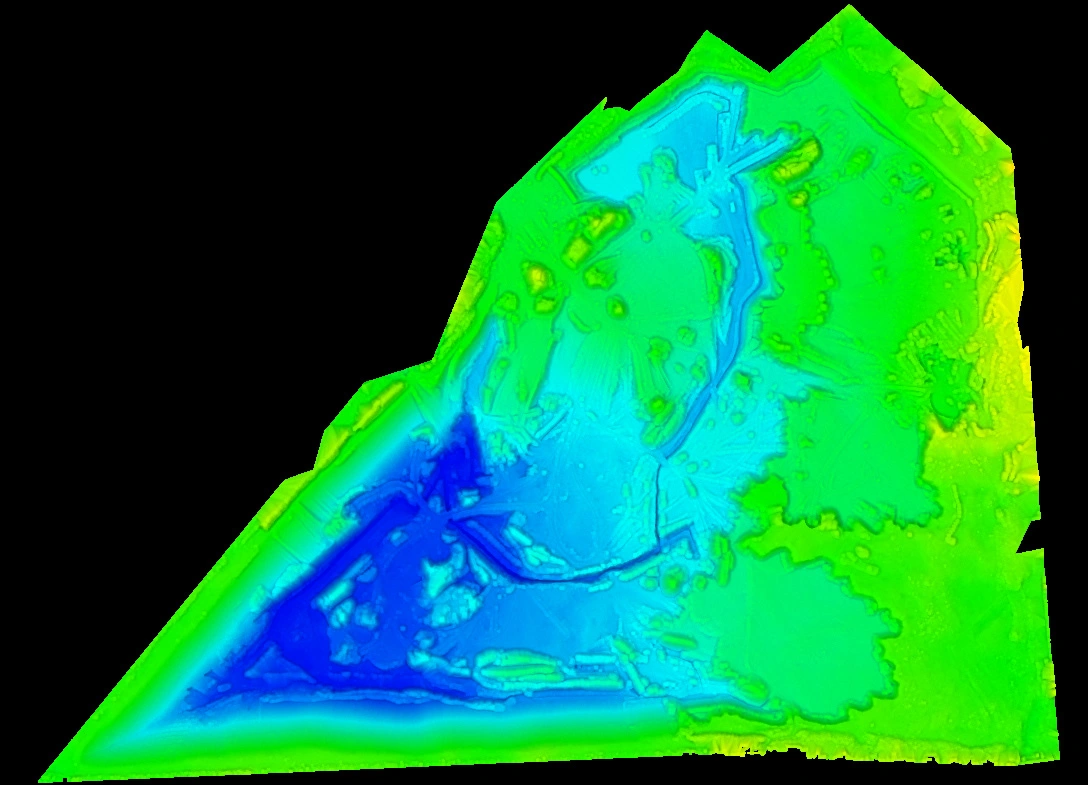 Рисунок 10. Цифровая модель рельефа.
Рисунок 10. Цифровая модель рельефа.
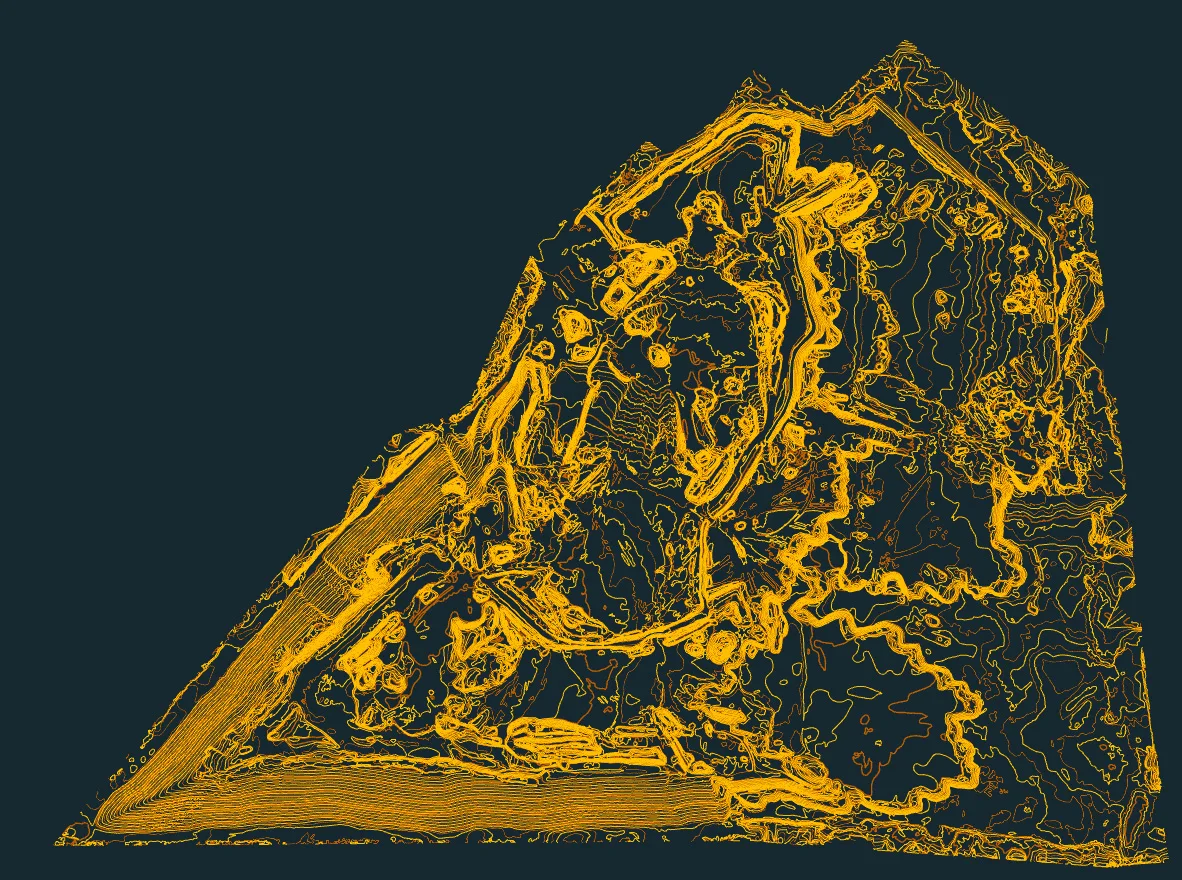 Рисунок 11. Горизонтали.
Рисунок 11. Горизонтали.
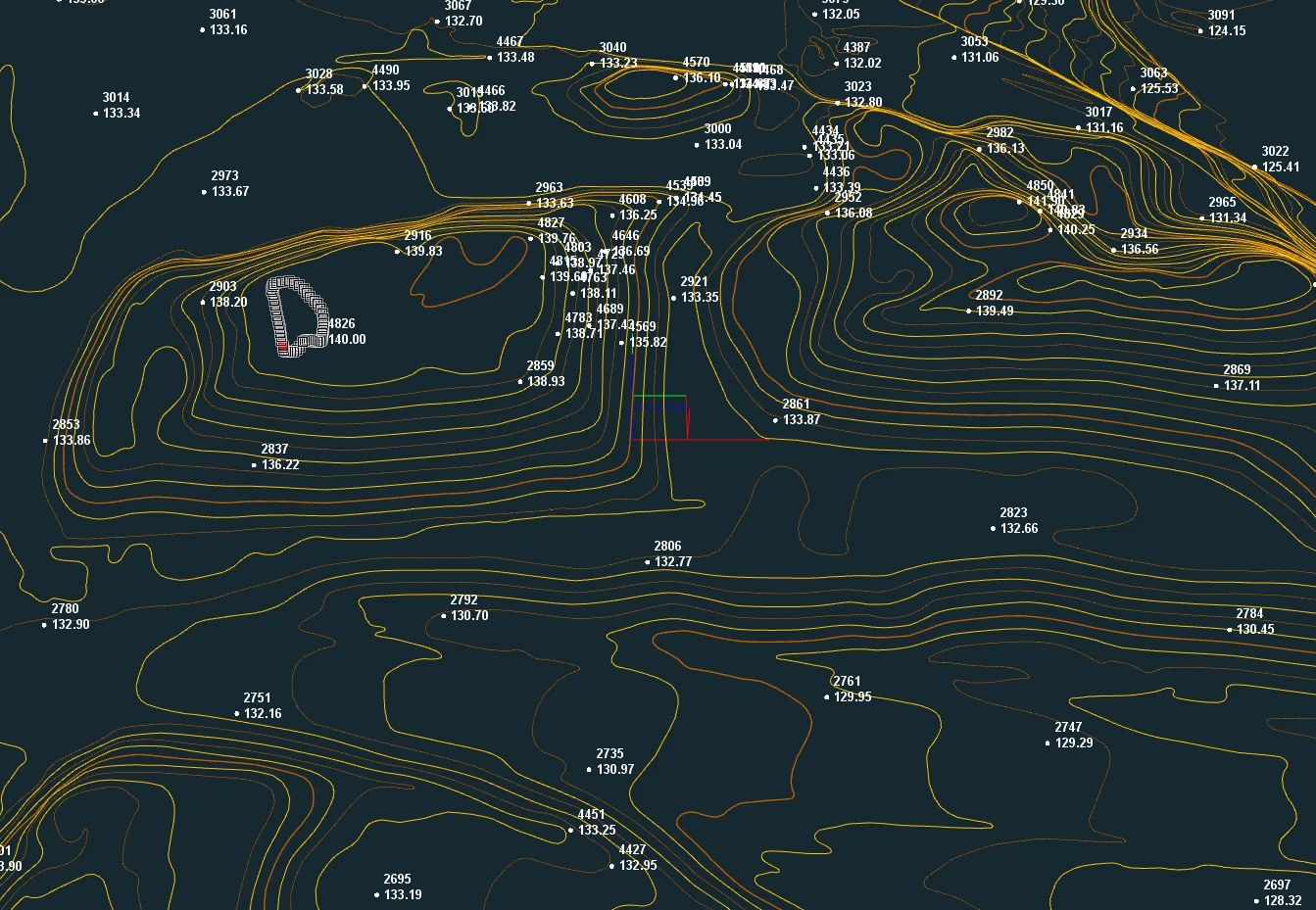 Рисунок 12. Горизонтали + пикеты.
Рисунок 12. Горизонтали + пикеты.
- Визуальная верификация данных
- Топологический анализ непрерывности поверхностей
- Перекрестная проверка с опорными точками.
По завершении обработки заказчику был передан комплексный пакет материалов, включающий:
- Облако точек высокой плотности
- Производные продукты в виде цифровых моделей рельефа
- Построенные горизонтали и пикеты
Для оценки эффективности технологии мобильного сканирования заказчик провел детальное сопоставление актуальных данных, полученных методом SLAM-сканирования и базовой поверхности, сформированной ранее методом аэрофотосъемки.
| № | X | Y | Z | H | dz |
| GCP-1 | 2263861.146 | 291800.019 | 134.211 | 134.2333 | 0.0223 |
| GCP-2 | 2263877.373 | 291487.738 | 139.176 | 139.2267 | 0.0507 |
| GCP-3 | 2263619.989 | 291219.029 | 142.290 | 142.3233 | 0.0333 |
| GCP-4 | 2263384.567 | 291959.923 | 132.575 | 132.6167 | 0.0417 |
| GCP-5 | 2263491.007 | 291884.847 | 123.809 | 123.84 | 0.031 |
| GCP-6 | 2263606.684 | 291780.832 | 123.205 | 123.22 | 0.015 |
| GCP-7 | 2263320.353 | 291827.357 | 133.391 | 133.4133 | 0.0223 |
| GCP-8 | 2263369.471 | 291569.831 | 120.513 | 120.55 | 0.037 |
| GCP-9 | 2263250.812 | 291511.787 | 123.85 | 123.9 | 0.05 |
| GCP-10 | 2262938.912 | 291588.296 | 118.246 | 118.2667 | 0.0207 |
Стандартное отклонение: 0.022
СКО (RMSE): 0.034
Средняя ошибка: 0.032
Минимальная ошибка: 0.015
Максимальная ошибка: 0.0507
Таблица 1. Оценка точности
Такой сравнительный анализ позволил:
- Визуализировать динамику изменений рельефа за межсъемочный период
- Количественно оценить точность разных методов дистанционного зондирования
- Определить оперативность получения результатов при использовании различных технологий
- Выявить преимущества и ограничения каждого метода в конкретных производственных условиях
Ключевые преимущества представленного решения:
- Возможность интеграции с ранее полученными данными
- Совместимость с различными GIS-платформами
- Готовность данных для непосредственного использования в проектных работах
- Полная метрическая и семантическая достоверность информации
Данный подход демонстрирует эффективность сочетания современных технологий съемки с традиционными методами контроля, обеспечивая комплексный мониторинг изменений горного отвода.
Вывод
SLAM 100 - это инновационное решение для съемки карьеров, которое экономит время и повышает точность данных. Он особенно полезен в условиях, где недоступен стабильный ГНСС или полное его отсутствие, но при этом требуется оперативный мониторинг изменений рельефа.
Где применяется:
- Контроль добычи полезных ископаемых.
- Ежедневный контроль выемки: Быстрое сканирование уступов и забоев для фиксации текущего состояния работ
- Расчеты объемов
- Мониторинг откосов.
- Анализ углов откосов: Построение точных профилей для проверки соответствия нормам безопасности
- Планирование и проектирование
- Создание актуальных 3D-моделей: Цифровые двойники карьера для планирования горных работ
- Оптимизация маршрутов техники: Анализ рельефа для выбора оптимальных путей перемещения
- Проектирование вскрышных работ: Точное определение объемов предстоящих работ
Если вам нужна съемка карьера с минимальными затратами - SLAM 100 станет лучшим выбором!
Нужна демонстрация или консультация? Обращайтесь к специалистам по работе со Slam технологиями компании TOPODRONE.
