

Содержание
- Технология SLAM и оборудование
- Практическое применение SLAM в геодезии
- Раскраска облака точек и панорамы
- Обработка данных в SLAM GO POST
- Камеральная обработка и векторизация
- Точность, плотность данных и накопление ошибок
- Производительность и требования к технике
- Практические советы и итоги
Команда TOPODRONE провела вебинар, к ходе которого продемонстрировала использование мобильных лазерных сканеров SLAM при создании топографических планов масштаба 1:200. Был рассмотрен весь рабочий процесс – от полевого сбора данных до выпуска финального топоплана. Ниже представлены основные выводы и рекомендации этого вебинара.
Запись вебинара доступна по ссылке:
Технология SLAM и оборудование
SLAM-системы объединяют данные лидара, инерциального модуля и камер, формируя облако точек в процессе движения оператора. В качестве базового примера используется модель SLAM 100, оснащенная тремя встроенными камерами с разрешением 5 Мп. Для повышения качества цветовой раскраски облака точек возможно подключение внешних панорамных камер, таких как Insta360 X4, обеспечивающих более детализированное изображение.
SLAM 200 и SLAM 200E являются развитием платформы SLAM 100. Сканеры оснащены двумя камерами по 12 Мп и лидарами Hesai XT16 или XT32 с дальностью сканирования до 300 м.

Изображение 1. Камера Insta X4

Изображение 2. SLAM 100

Изображение 3. SLAM 200

Изображение 4. SLAM 200E
Сравнительная таблица основных характеристик SLAM 100, SLAM 200E, SLAM 200.
| Характеристика | SLAM200E | SLAM200 | SLAM100 |
|---|---|---|---|
| Габариты | 404 × 170 × 188 мм | 185 × 170 × 404 мм | 372 × 163 × 106 мм |
| Вес | 1,6 кг (2,1 кг с батареей) | 1,3 кг (1,8 кг с ручкой) | 1,59 кг |
| Рабочая дальность | 120 м | 300 м | 120 м |
| Частота сканирования | 320 / 640 тыс. т/с | 640 тыс. т/с | 320 тыс. т/с |
| Угол сканирования | 360° × 270° | 360° × 270° | 360° × 270° |
| Разрешение камер | 12 Мп | 12 Мп | 5 Мп |
| Точность получаемых данных | ≈ 2 см | ≈ 2 см | 3–5 см |
| GNSS / RTK | есть | есть | отдельный модуль |
| Работа без ГНСС (SLAM) | да | да | да |
| Батареи | встроенная | встроенная | 4 × сменные 3350 мАч |
| Рабочая температура | –20 … +50 °C | –20 … +50 °C | –10 … +45 °C |
Практическое применение SLAM в геодезии
Практическая ценность SLAM-технологии проявляется в условиях, где традиционные ГНСС-приемники и тахеометры работают нестабильно. Например, при глушении спутниковых сигналов или на участках со сложным рельефом. В таких случаях мобильные SLAM-сканеры позволяют оперативно собирать данные для топографической съемки, кадастровых и маркшейдерских работ, а также задач ландшафтного проектирования независимо от спутниковой навигации.
В качестве практического примера рассмотрена съемка участка площадью около 40 соток с большим количеством мелких объектов. Сканирование выполнялось вручную, с плотной сеткой проходов и обязательными замыканиями траектории, что позволило минимизировать накопление погрешности.

Изображение 5. Здание на сканируемом участке
Для открытых территорий обычно достаточно проходов с интервалом 15–25 м. На сложных объектах шаг уменьшают и дополняют обходами внутри зданий или на подземных уровнях. Для точной геопривязки используются опорные точки (GCP) — не менее трех на объект, оптимально с размещением через 150–250 м по периметру и в центральной части. При наличии стабильного RTK-сигнала возможна прямая привязка облака, однако на практике чаще применяется опорная схема.



Изображение 6-8. Сканирование территории со SLAM 100
Раскраска облака точек и панорамы
После завершения полевых работ важным этапом является раскраска облака точек (RGB). В SLAM 100 за цветовую фиксацию отвечают три встроенные камеры, однако при подключении внешних панорамных камер Insta360 X4 цветовая информация становится более детализированной. Геопривязанные панорамы сохраняются вместе с координатами и ориентацией камеры и используются на этапе камеральной обработки для уточнения мелких элементов, дешифровки объектов и ручной векторизации.



Изображение 9-11. Облако точек (RGB)
Обработка данных в SLAM GO POST
Для постобработки данных используется фирменное программное обеспечение SLAM GO POST, поставляемое в комплекте с оборудованием. Процесс максимально автоматизирован: пользователь импортирует данные лидара и IMU, указывает тип установки сканера (в руке, на рюкзаке или автомобиле) и выбирает алгоритм обработки.


Изображение 12-13. Облако точек по высоте и в RGB
Предусмотрено два режима:
- Алгоритм A (Fast) — быстрый режим с минимальным связыванием сканов. Применяется, когда приоритетом является скорость обработки, например при съемке обширных лесных массивов.
- Алгоритм B (High Precision) — более медленный, но детализированный режим, обеспечивающий устойчивые связи между проходами и точное совмещение облака точек.
Практика показывает, что корректный выбор алгоритма критичен: в ряде случаев переход с режима High Precision на Fast позволяет устранить задвоения линейных объектов и повысить стабильность результата.
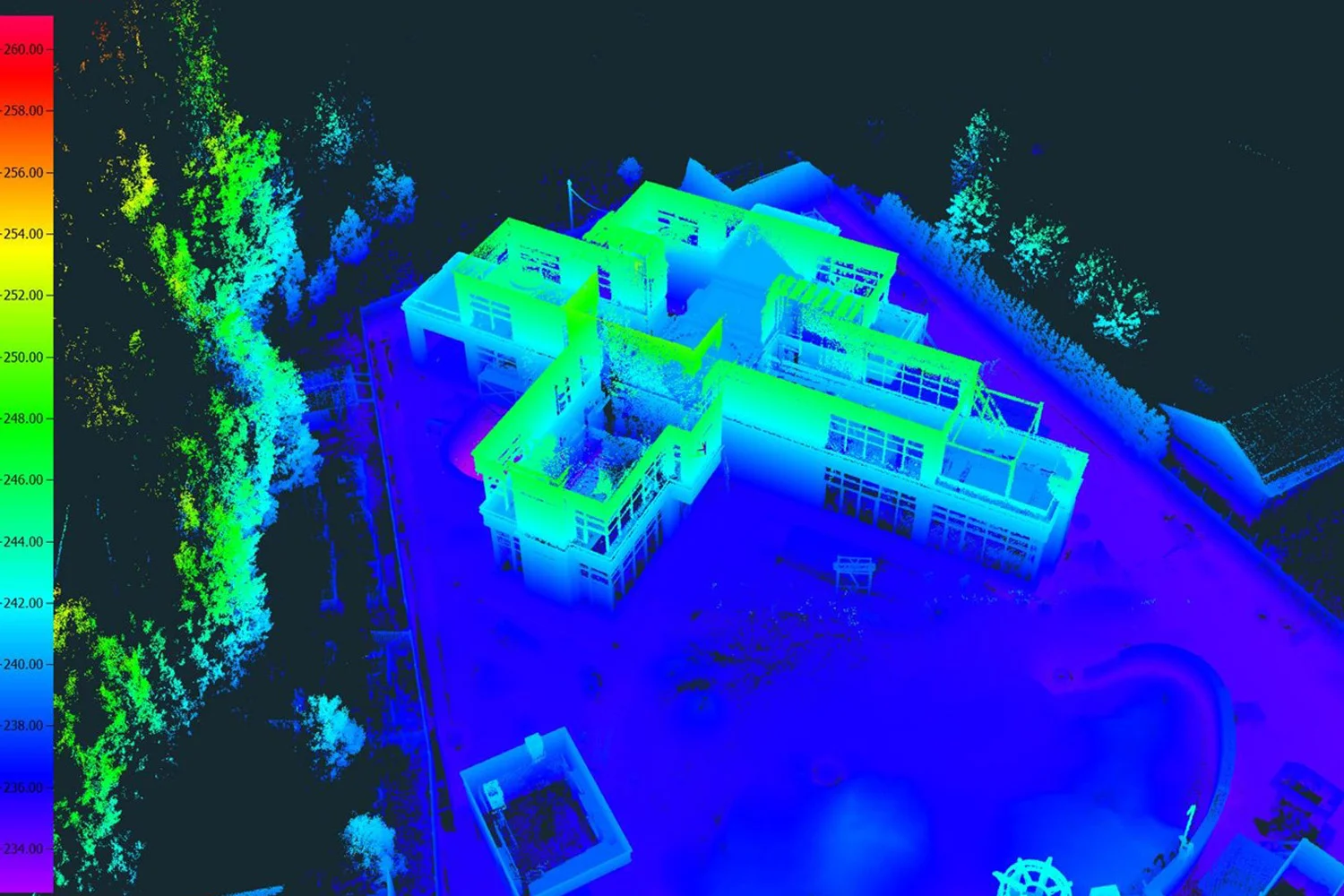

Изображение 14-15. Облако точек по высоте
По завершении обработки формируется единое облако точек в заданной системе координат, доступное для экспорта в форматах LAS, LAZ или E57. Формат E57 удобен для хранения не только цветовой информации, но и панорамных изображений.
Камеральная обработка и векторизация
На этапе камеральной обработки облако точек преобразуется в векторный чертеж. Для этих задач часто используется программа 3D Survey, которая, помимо фотограмметрии, хорошо работает и с SLAM-данными. В ней выполняется векторизация линейных объектов, контуров и высотных отметок, а инструмент X-Ray и встроенный классификатор рельефа упрощают построение горизонталей.
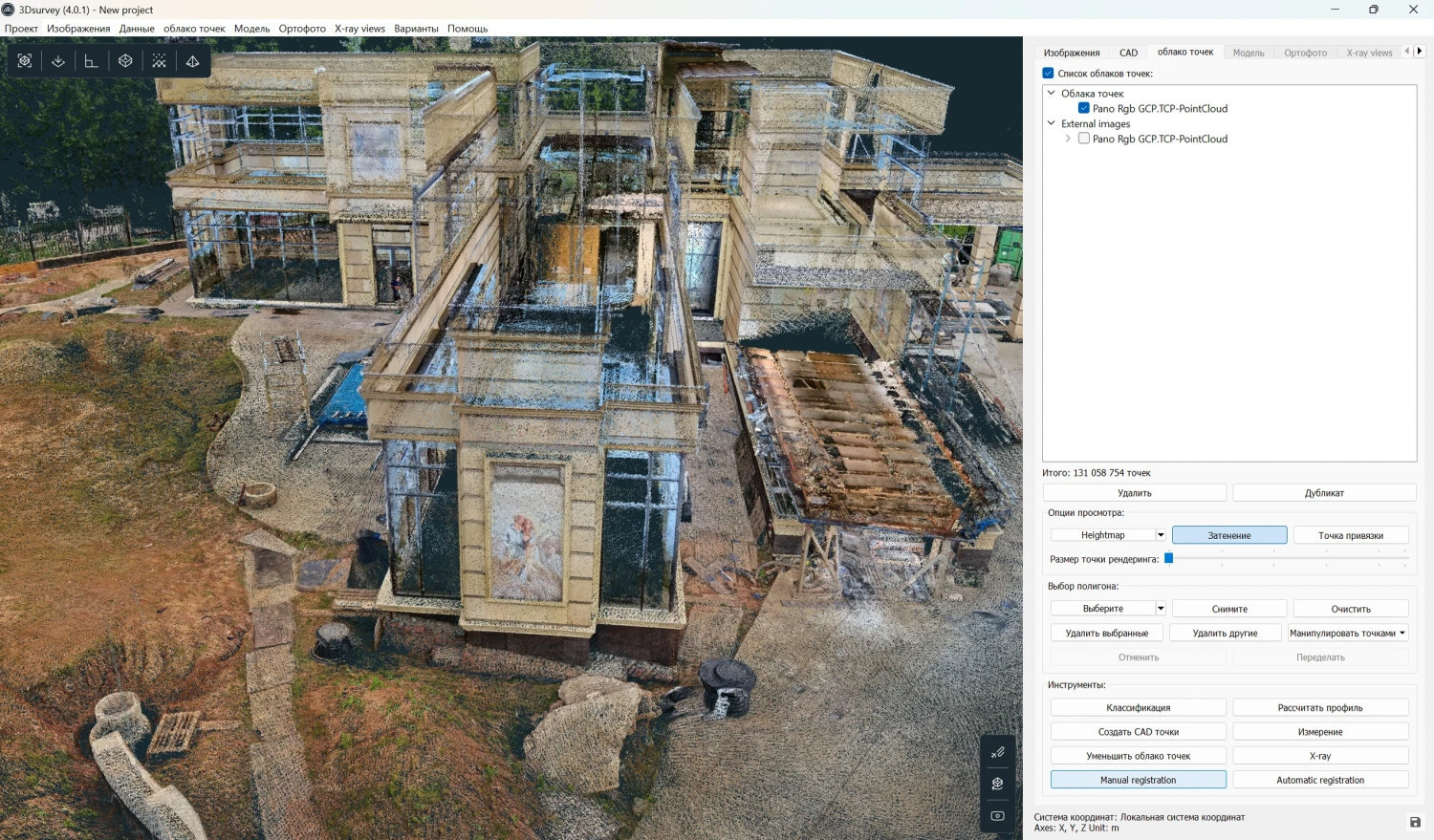
Изображение 16. Камеральная обработка в 3Dsurvey
Альтернативным решением является отечественное ПО CREDO 3D Scan, позволяющее наносить условные топографические знаки непосредственно в процессе отрисовки. Выбор программного обеспечения зависит от задач проекта и предпочтений исполнителя.
Для контроля качества и вспомогательных операций может применяться CloudCompare, а для специализированных задач анализа рельефа и инвентаризации зеленых насаждений — LiDAR360, позволяющий автоматически выявлять деревья по данным облака точек.

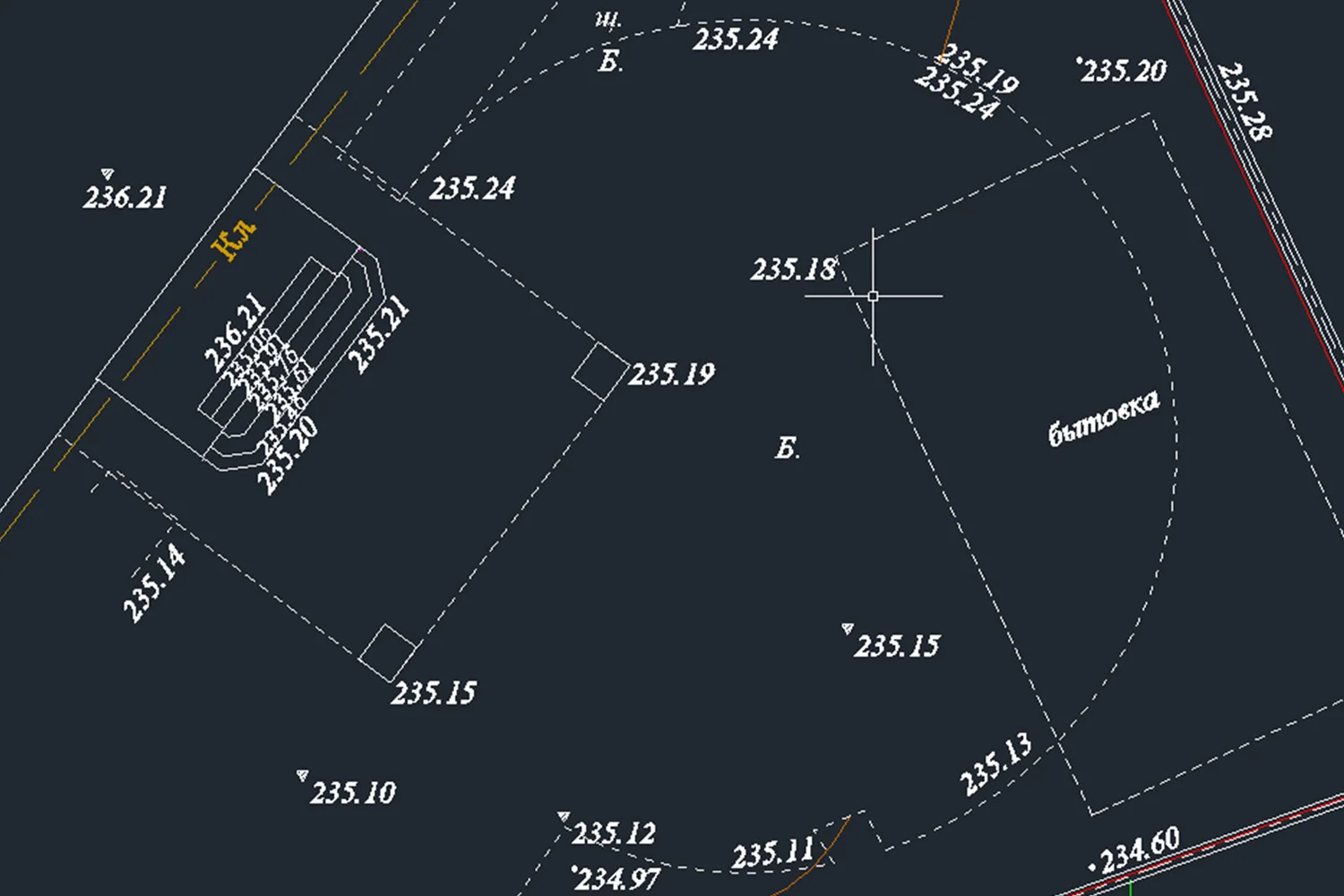
Изображение 17-18. Топографический план территории со SLAM
Результатом обработки становится 3D-модель местности и векторный топографический план, который экспортируется в формат DXF и при необходимости дорабатывается в AutoCAD или Civil 3D. Использование классифицированного рельефа и привязанных панорам упрощает построение горизонталей и уточнение элементов инженерной инфраструктуры.
Точность, плотность данных и накопление ошибок
Толщина облака точек, формируемого в режиме реального времени, обычно составляет 2–3 см и уменьшается до 1,5–2 см по твердым объектам после постобработки. При наличии стабильного RTK-решения планово-высотная точность достигает порядка 5 см. При работе без ГНСС и привязке к наземным опорным точкам точность относительно контрольных значений может достигать 15–20 мм.
Накопление погрешности при протяженных однопроходных съемках без внешней коррекции оценивается примерно как 5 см на 500 м. Для минимизации искажений рекомендуется замыкать траектории сканирования и размещать опорные точки с шагом не более 200–250 м.
SLAM-системы имеют и объективные сенсорные ограничения: они не обеспечивают миллиметровую точность, характерную для стационарных лазерных сканеров. Их практический предел — несколько миллиметров по близким объектам, что достаточно для топографической и кадастровой съемки, но недостаточно для высокоточного инженерного контроля. Поэтому SLAM следует рассматривать как эффективное дополнение, а не замену классических методов при задачах с жесткими требованиями к точности.
Видео 2. 3D-модель облака точек по итогам SLAM-сканирования
Производительность и требования к технике
Мобильное лазерное сканирование формирует значительные объемы данных: даже съемка участка площадью в несколько сотен гектаров может давать 300–400 ГБ исходных файлов. Для стабильной и комфортной обработки рекомендуется следующее аппаратное обеспечение:
- не менее 64 ГБ оперативной памяти;
- быстрые NVMe SSD-диски для хранения и обработки данных;
- производительный многоядерный процессор и современные игровые видеокарты;
- внешние накопители или сетевые хранилища (NAS) для архивного хранения.
Крупные проекты целесообразно разбивать на отдельные части, что позволяет снизить нагрузку на систему и избежать зависаний при обработке.
Практические советы и итоги
На основе практического опыта применения SLAM-технологии в геодезии можно выделить несколько ключевых рекомендаций:
- Замыкайте маршруты сканирования — это существенно повышает стабильность и точность результата.
- Используйте достаточное количество опорных точек (GCP): минимум три на объект, при большой площади используйте шаг 150–250 м.
- Контролируйте покрытие в поле, используя облако точек в реальном времени, и заранее учитывайте условия освещенности в случае, если необходимо получить окрашенное облако точек. Для ночной съемки с раскраской необходимы внешние источники света.
- Гибко выбирайте алгоритм обработки: смена режимов High Precision и Fast часто позволяет устранить артефакты и повысить устойчивость модели.
- Планируйте ресурсы хранения и обработки заранее — SLAM-съемка формирует большие объемы данных и требует производительного оборудования.
В целом SLAM-сканеры не заменяют полностью тахеометрию и RTK-измерения, но эффективно дополняют их. Данная технология особенно актуальна при работе с крупными объектами и позволяет одному оператору выполнять значительные объемы съемки даже в сложных условиях, обеспечивая высокую производительность при точности, достаточной для большинства инженерно-геодезических задач. При корректной привязке и аккуратной камеральной обработке облако точек уверенно преобразуется в метрически точный топографический план.











")





